EXE_OP
CLOSEPOS
EXE_OP
OPENPOS
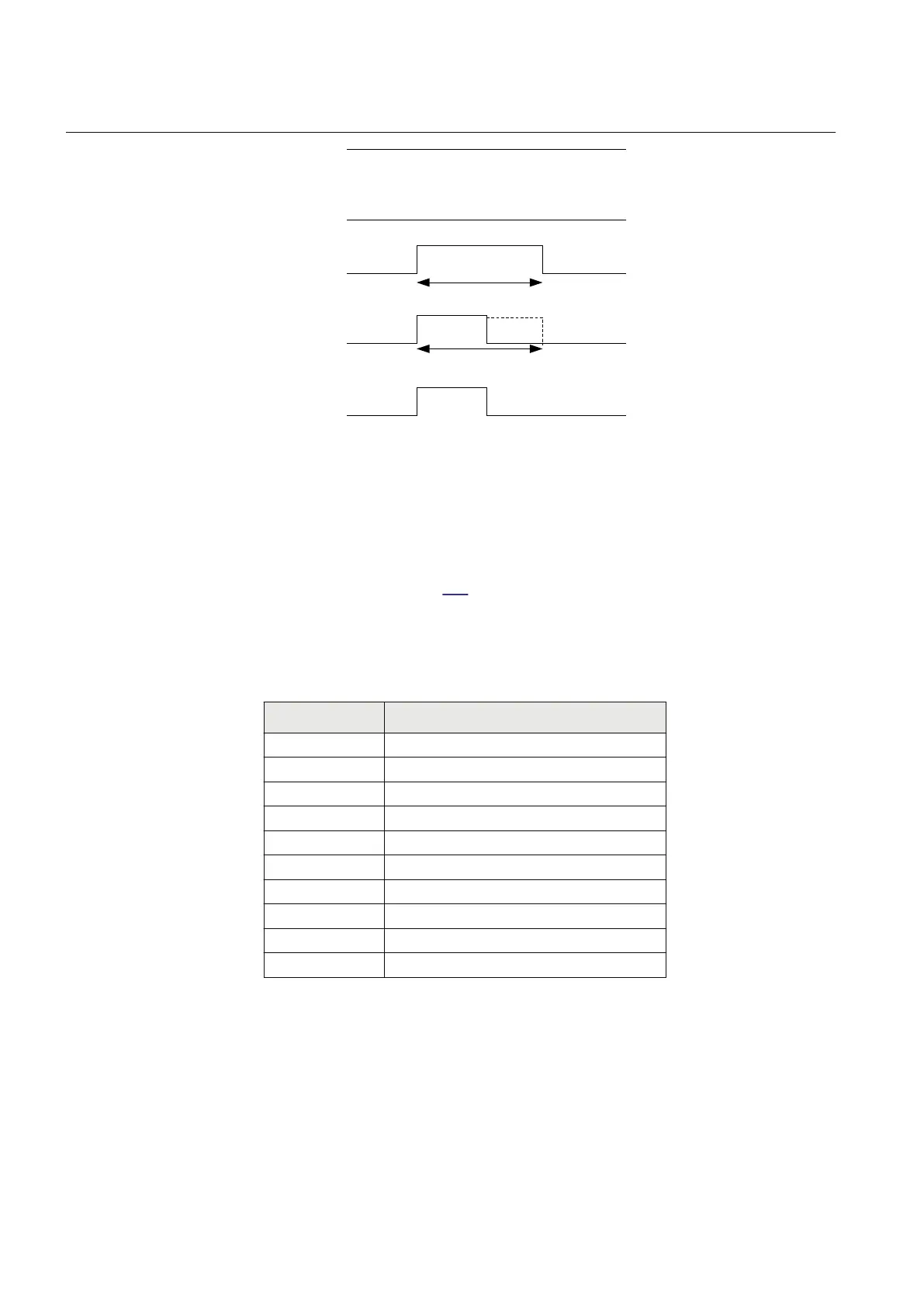
AdaptivePulse=FALSE
tOpenPulse
tOpenPulse
AdaptivePulse=TRUE
tStartMove timer
en05000099.vsd
IEC05000099 V1 EN
Figure 127: Open command with open position indication
Error handling
Depending on the error that occurs during the command sequence the error signal will
be set with a value. Table 197 describes vendor specific cause values in addition to
these specified in IEC 61850-8-1 standard. The list of values of the “cause” are in
order of priority. The values are available over the IEC 61850. An output L_CAUSE
on the function block indicates the latest value of the error during the command.
Table 197: Values for "cause" signal in priority order
Apparatus control
function
Description
–22 wrongCTLModel
–23 blockedForCommand
–24 blocked-for-open-command
–25 blocked-for-close-command
–30 longOperationTime
–31 switch-not-start-moving
–32 persistent-intermediate-state
–33 switch-returned-to-initial-position
–34 switch-in-bad-state
–35 not-expected-final-position
10.3.9.4 Bay control QCBAY
The functionality of the Bay control (QCBAY) function is not defined in the IEC
61850–8–1 standard, which means that the function is a vendor specific logical node.
Section 10 1MRK 511 287-UEN A
Control
260
Technical manual

 Loading...
Loading...











