116 Rockwell Automation Publication 2198-UM005C-EN-P - February 2022
Chapter 6 Configure and Start up the Kinetix 5300 Drive System
Configure Vertical Load
Control Axis Properties
A vertical load is an axis that can move due to stored potential energy. Some
examples include a robot arm, lift, or compressed spring. When set to Enabled,
rather than applying Stop Category 0 stopping actions in response to most
major fault conditions, the drive brings the motor to a controlled stop and
engages the holding brake prior to disabling the power structure.
When Vertical Load Control is enabled and the drive supports Torque Proving
and Brake Proving functionality, the controller sets the associated Proving
Configuration attribute default value to enable.
For more information on controlling vertical loads, see the Vertical Load and
Holding Brake Management Application Technique, publication
MOTION-AT003
.
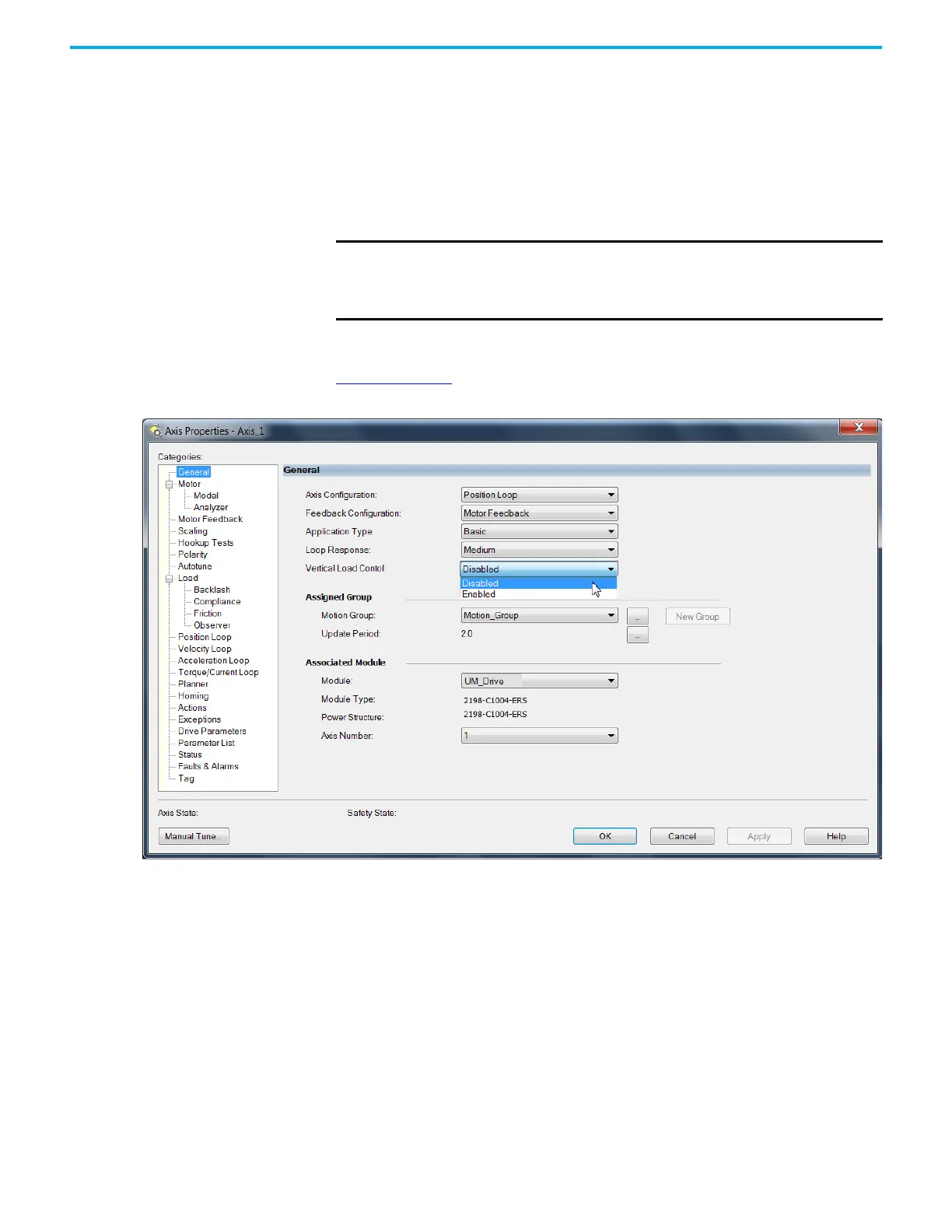
Figure 58 - Configure Vertical Load Control
Configure Feedback-only
Axis Properties
Follow these steps to configure feedback-only axis properties.
1. In the Controller Organizer, right-click an axis and choose Properties.
2. Select the General category.
IMPORTANT Brake proving functionality is applicable only to drive control modes that are
capable of generating holding torque based on a feedback device.
Therefore, Brake Proving is not applicable to Frequency Control mode with
Sensorless Vector control method.

 Loading...
Loading...











