162 Rockwell Automation Publication 2198-UM005C-EN-P - February 2022
Chapter 9 Kinetix 5300 Safe Torque Off Function
Fault Codes
Both redundant STO input signals are expected to always be in the same state
and transition from one state to another simultaneously.
If a fault condition is detected, the motion producing power can be applied to
the motor only after fault reset conditions are satisfied.
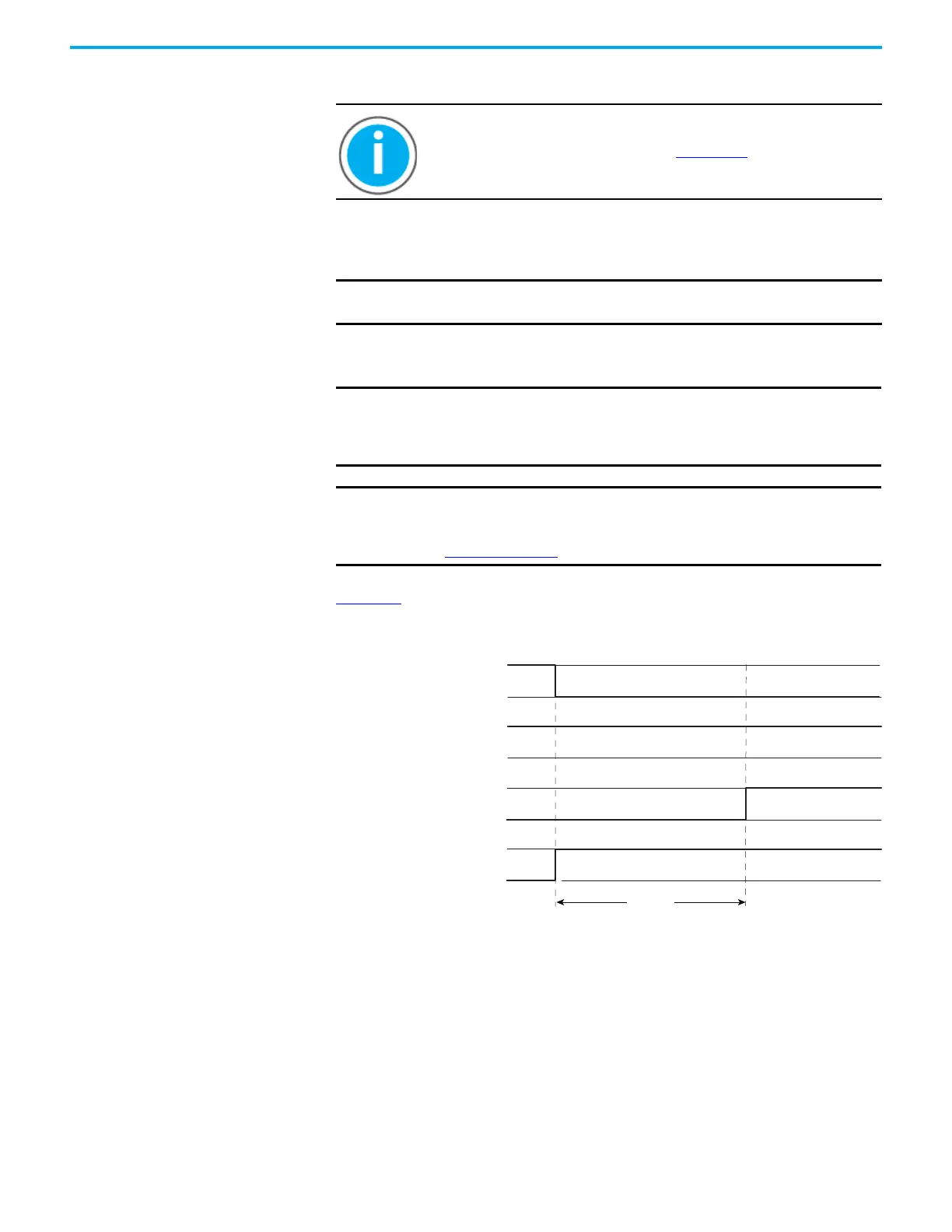
Figure 70
demonstrates when the Safe Torque Off discrepancy is detected and
a GuardStopInputFault is posted.
Figure 70 - System Operation in the Event of STO Inputs Discrepancy (fault case 1)
For Kinetix 5300 fault code descriptions and possible solutions, see
This manual links to Kinetix 5300 Single-axis EtherNet/IP Servo Drives
Fault Codes Reference Data, publication 2198-RD006
, for fault codes.
Download the spreadsheet now for offline access.
IMPORTANT If both STO inputs are not in the OFF state simultaneously within 100 ms or
after 1 second, GuardStopInputFault is posted.
IMPORTANT GuardStopInputFault can be reset only if both inputs are in the OFF-state for
more than 1 second. After the fault reset requirement is satisfied, an MAFR
command in the Logix Designer application must be issued to reset
GuardStopInputFault.
IMPORTANT GuardStopInputFault active state shall not be used as indication of STO
state. Only deactivation of SS_IN_CH0 and SS_IN_CH1 inputs provides STO
function with integrity. For GuardStopInputFault behavior description, see
Table 79 on page 149
.
24V DC
24V DC
0V DC
0V DC
1
1
0
0
1 second
GuardStopRequestStatus
GuardStopInputFault
SS_IN_CH0
SS_IN_CH1

 Loading...
Loading...











