224 Rockwell Automation Publication 2198-UM005C-EN-P - February 2022
Appendix C Motor Control Feature Support
For MDS instruction:
• When using SLAT, start the axis with an MDS instruction.
• The MDS instruction turns on the power structure enable and tracking
command status and also executes the velocity command.
See sample code in Motion Drive Start (MDS) Instruction
.
• The acceleration and deceleration rate is controlled by Ramped
Acceleration and Ramped Deceleration by using the SSV instruction.
• The Torque Command is set to Axis Tag.Torque Trim. Make sure the
Torque Trim Write is checked in the drive parameter (see Drive
Parameters dialog box above). The value can be changed.
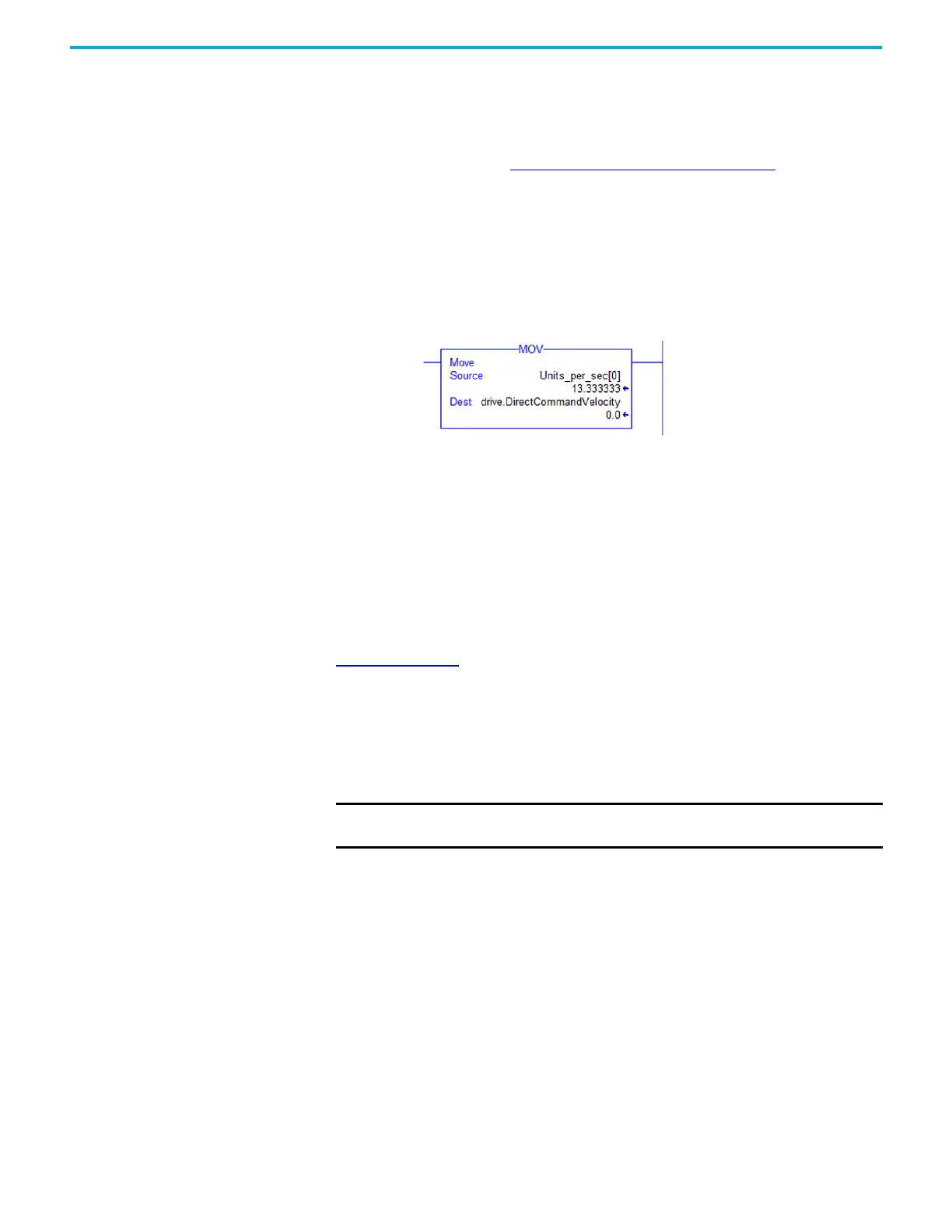
– Alternatively, you can use the Axis Tag.DirectCommandVelocity to alter
the Velocity Command when the existing MDS instruction is being
executed.
• To stop the axis, use MAS instructions, keeping the Change Decel to NO
and by using an SSV instruction to change Ramped Deceleration for the
desired rate.
Motion Drive Start (MDS) Instruction
Use the MDS instruction to activate the drive control loops for the specified
axis and run the motor at the specified speed.
For information regarding the MDS instruction, refer to the Logix 5000™
Controllers Motion Instructions Reference Manual, publication
MOTION-RM002
.
For the Kinetix 5300 drive, the MDS instruction is valid only when the axis
configuration is set to one of these control modes:
• Frequency Control
• Velocity Loop
• Torque Loop
IMPORTANT The MDS instruction is not valid when the axis configuration is set to Position
Loop.

 Loading...
Loading...











