Rockwell Automation Publication 2198-UM005C-EN-P - February 2022 219
Appendix C Motor Control Feature Support
Speed Limited Adjustable
Torque (SLAT)
Speed limited adjustable torque (SLAT) is a special mode of operation used
primarily in web handling applications. While configured for SLAT, the drive
typically operates as a torque regulator. The drive can automatically enter
velocity regulation based on conditions within the velocity regulator and the
magnitude of the velocity regulator's output, relative to the applied
TorqueTrim attribute.
A torque regulated application can be described as any process requiring
tension control. For example, a winder or unwinder with material being drawn
or pulled with a specific tension required. The process also requires that
another element set the speed.
When operating as a torque regulator, the motor current is adjusted to achieve
the desired torque. If the material being wound or unwound breaks, the load
decreases dramatically and the motor can potentially go into a runaway
condition.
The SLAT feature is used to support applications that require a robust
transition from torque regulation to velocity regulation (and vice versa). The
SLAT feature can be configured via the SLATConfiguration attribute as:
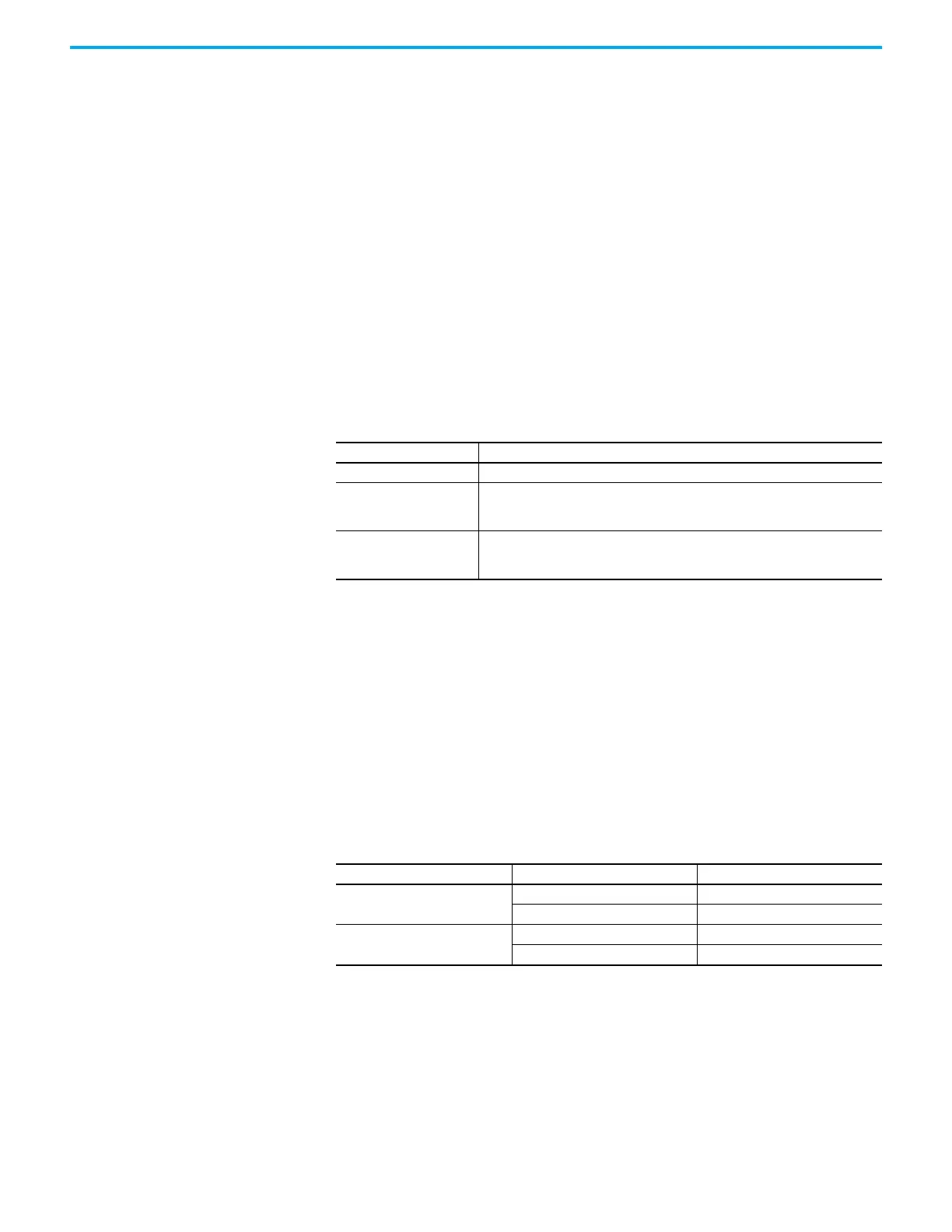
Table 100 - SLAT Configuration Descriptions
Direction of the applied torque and direction of the material movement
determine whether SLAT minimum or SLAT maximum mode should be used.
Motion Polarity Setting
The Motion Polarity setting in the Logix Designer application>Axis
Properties>Polarity does not affect SLAT behavior, however, you may require
clarification on whether to use the SLAT Min Speed/Torque or SLAT Max
Speed/Torque configuration when Motion Polarity is set to Inverted. In this
case, the velocity error displayed in the Logix Designer application is inverted
compared to what is actually used by the axis to control the SLAT function. So,
if the SLAT configuration is set to Min and then Motion Polarity is switched to
Inverted, change the SLAT configuration to Max.
Table 101 - SLAT Operation When Motion Polarity Is Inverted
SLAT Min Speed/Torque
SLAT Min Speed/Torque is a special mode of operation primarily used in web
handling applications. The drive typically operates as a torque regulator,
provided that the TorqueTrim attribute is less than the torque output due to
the velocity regulator's control effort. The drive can automatically enter
velocity regulation based on conditions within the velocity regulator and the
magnitude of the velocity regulator's output relative to the torque reference.
Name Description
SLAT Disable SLAT function is disabled. Normal Velocity Loop operation.
SLAT Min Speed/Torque
Drive automatically switches from Torque regulation to Velocity regulation if
VelocityError < 0 and switches back to Torque regulation if VelocityError > SLATSetPoint
for SLATTimeDelay.
SLAT Max Speed/Torque
Drive automatically switches from Torque regulation to Velocity regulation if
VelocityError > 0 and switches back to Torque regulation if VelocityError < SLATSetPoint
for SLATTimeDelay.
Velocity Command Motion Polarity SLAT Configuration
Positive (clockwise)
Normal Min
Inverted Max
Negative (CCW)
Normal Min
Inverted Max

 Loading...
Loading...











