Motor control
SIMOCODE pro
GWA 4NEB 631 6050-22 DS 03
4-29
Settings
You will find detailed information about the settings in:
Chapter 4.2.2 "General settings and definitions".
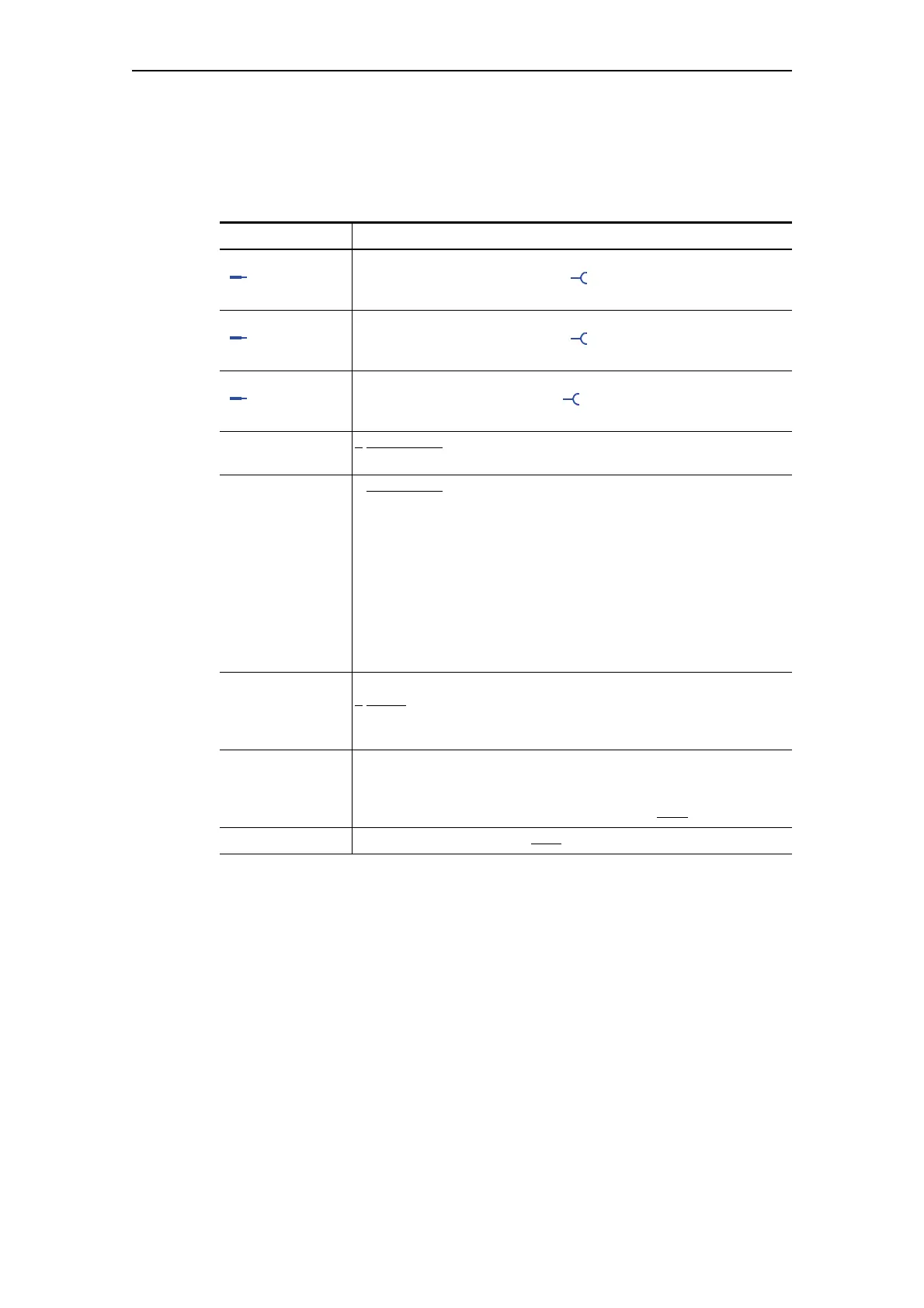
Circuit breaker Description
OFF OFF control command
(connection with arbitrary socket ,
usually with "Enabled control command - OFF" socket)
ON > ON control command
(connection with arbitrary socket ,
usually with "Enabled control command - ON >" socket)
FB ON Auxiliary control input "Feedback ON"
(Connection always with socket , (input), which the auxiliary
switch of the circuit breaker is connected to).
Non-maintained
command mode
•
Deactivated
• Activated
Separate failsafe
function from
control function
• Deactivated
:
Safety-oriented tripping via the DM-F module also affects the
SIMOCODE pro control function, so that additional fault
messages are avoided.
This setting is selected for applications where safety-oriented
tripping directly affects the motor controlled by SIMOCODE pro.
• Activated:
Safety-oriented tripping via the DM-F module does not affect the
SIMOCODE pro control function.
This setting is selected for applications where safety-oriented
tripping does not affect the motor controlled by SIMOCODE pro.
Load type You can choose between:
•
Motor
• Resistive load (see Chapter 4.2.2 "General settings and
definitions")
Feedback time A repeated ON pulse is only output by the QE1 contactor control
once the set feedback time has elapsed. Therefore, the feedback
time should be greater than the motor stop time of the motor drive
of the circuit breaker. Range 0 - 25.5 seconds (0.5 s
)
Execution time Range 0 - 6553.5 seconds (1.0 s
)
Table 4-9: Circuit breaker settings

 Loading...
Loading...








