System description
SIMOCODE pro
GWA 4NEB 631 6050-22 DS 03
1-13
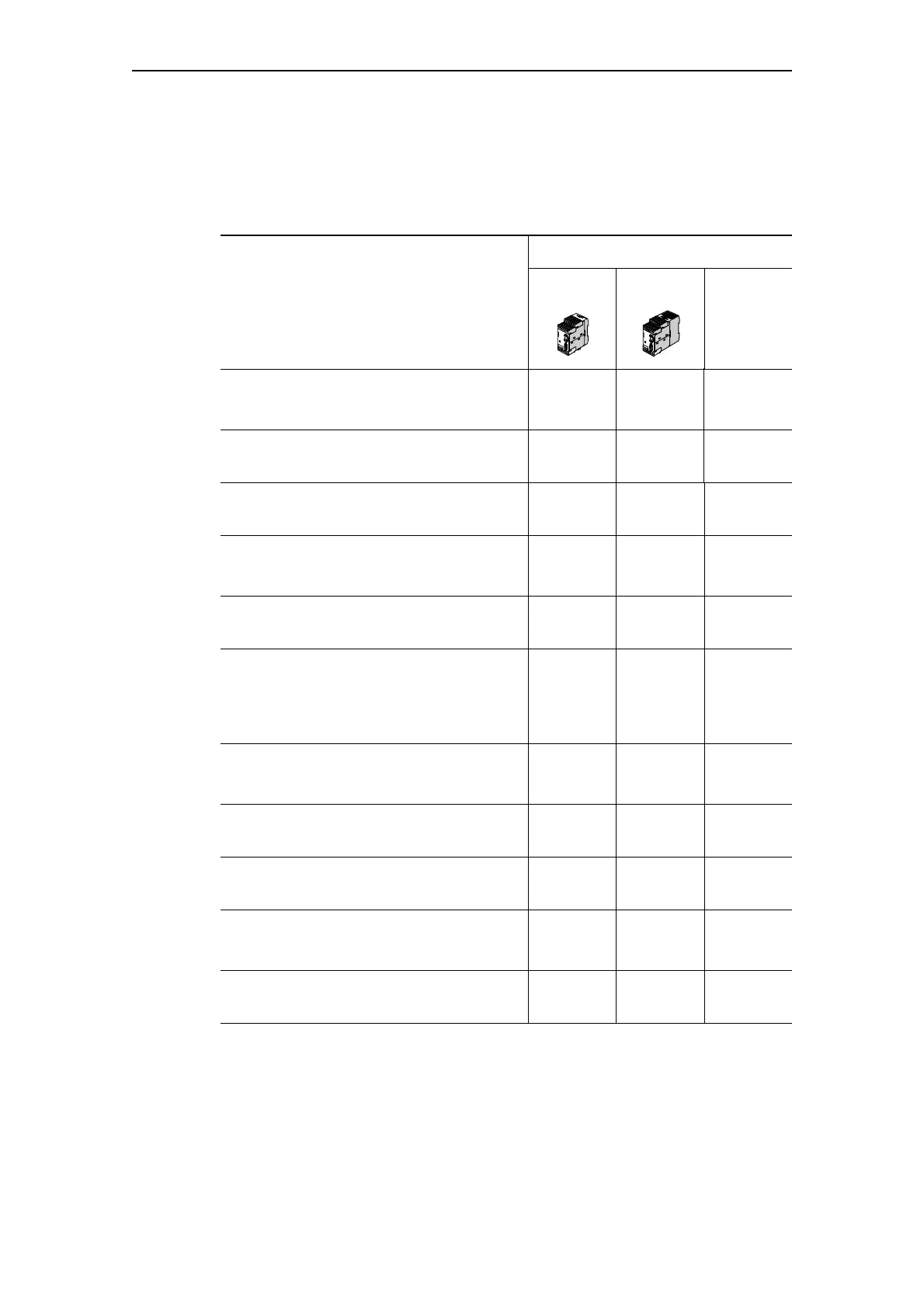
1.4 Check list for selecting a device series
The following check list should help you decide upon the optimum device
series for your requirements:
SIMOCODE
Requirements pro C
(BU1)
pro V
(BU2)
Footnote
Standard motor feeders (4 inputs, 3 outputs)
with control functions for direct starters,
reversing starters, intelligent overload relays
✓✓
1)
Monitoring of stalled rotor, unbalance, phase
failure ✓✓
1)
Current measuring, current limit monitoring,
overload protection
✓ ✓
1)
Earth-fault monitoring via the current
measuring module (internal)
✓ ✓
1)
Thermistor motor protection with PTC (binary)
✓ ✓
Motor feeder with control function:
Star-delta starters, Dahlanders, pole-changing
starters, soft starters – each also possible in
combination with reversing starter –, solenoid
valves, positioners
— ✓
1)
Measuring, processing and outputting analog
values e.g. flow rate, fill level, etc.
(if necessary via an analog module)
— ✓
2)
Current measuring and voltage measurement
— ✓
3)
Voltage monitoring for undervoltage
— ✓
3)
Power management, implementing power
considerations (power, cos phi), power
monitoring
— ✓
3)
More than 4 binary inputs required
(maximum 12)
— ✓
2)
Table 1-1: Check list for selecting a device series
1) Via current measuring module
2) With expansion modules
3) Via current/voltage measuring modules

 Loading...
Loading...








