Motor control
SIMOCODE pro
4-64 GWA 4NEB 631 6050-22 DS 03
Settings
You will find detailed information about the settings in:
Chapter 4.2.2 "General settings and definitions".
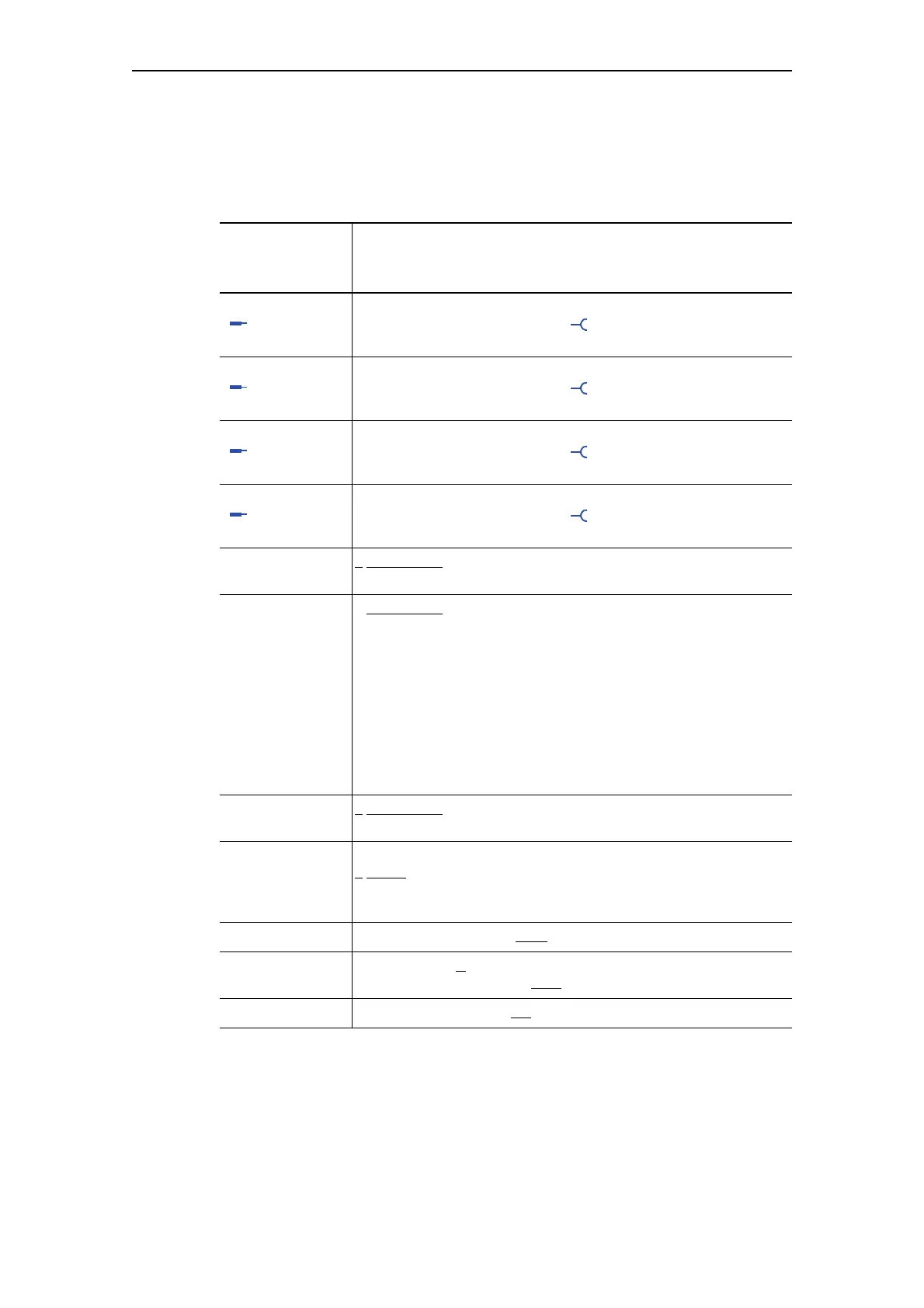
Soft starter with
reversing
contactor
Description
ON < ON < control command, counter-clockwise
(connection with arbitrary socket ,
usually with "Enabled control command - ON <" socket)
OFF OFF control command
(connection with arbitrary socket ,
usually with "Enabled control command - OFF" socket)
ON > ON > control command, clockwise
(connection with arbitrary socket ,
usually with "Enabled control command - ON >" socket)
FB ON Auxiliary control input "Feedback ON"
(connection with arbitrary socket ,
usually with "Status - Motor current flowing" socket)
Non-maintained
command mode
•
Deactivated
• Activated
Separate failsafe
function from
control function
• Deactivated
:
Safety-oriented tripping via the DM-F module also affects the
SIMOCODE pro control function, so that additional fault
messages are avoided.
This setting is selected for applications where safety-oriented
tripping directly affects the motor controlled by SIMOCODE pro.
• Activated:
Safety-oriented tripping via the DM-F module does not affect the
SIMOCODE pro control function.
This setting is selected for applications where safety-oriented
tripping does not affect the motor controlled by SIMOCODE pro.
Saving change-over
command
•
Deactivated
• Activated
Load type You can choose between:
•
Motor
• Resistive load (see Chapter 4.2.2 "General settings and
definitions")
Feedback time Range 0 - 25.5 seconds (0.5 s
)
Execution time Execution time > Smooth running down time
Range 0 - 6553.5 seconds (1.0 s
)
Interlocking time Range 0 - 255 seconds (0 s)
Table 4-20: Soft starter with reversing contactor settings

 Loading...
Loading...








