AP1.2 Configuration of NMEA Ver-3.00 Sentence
AP1-9
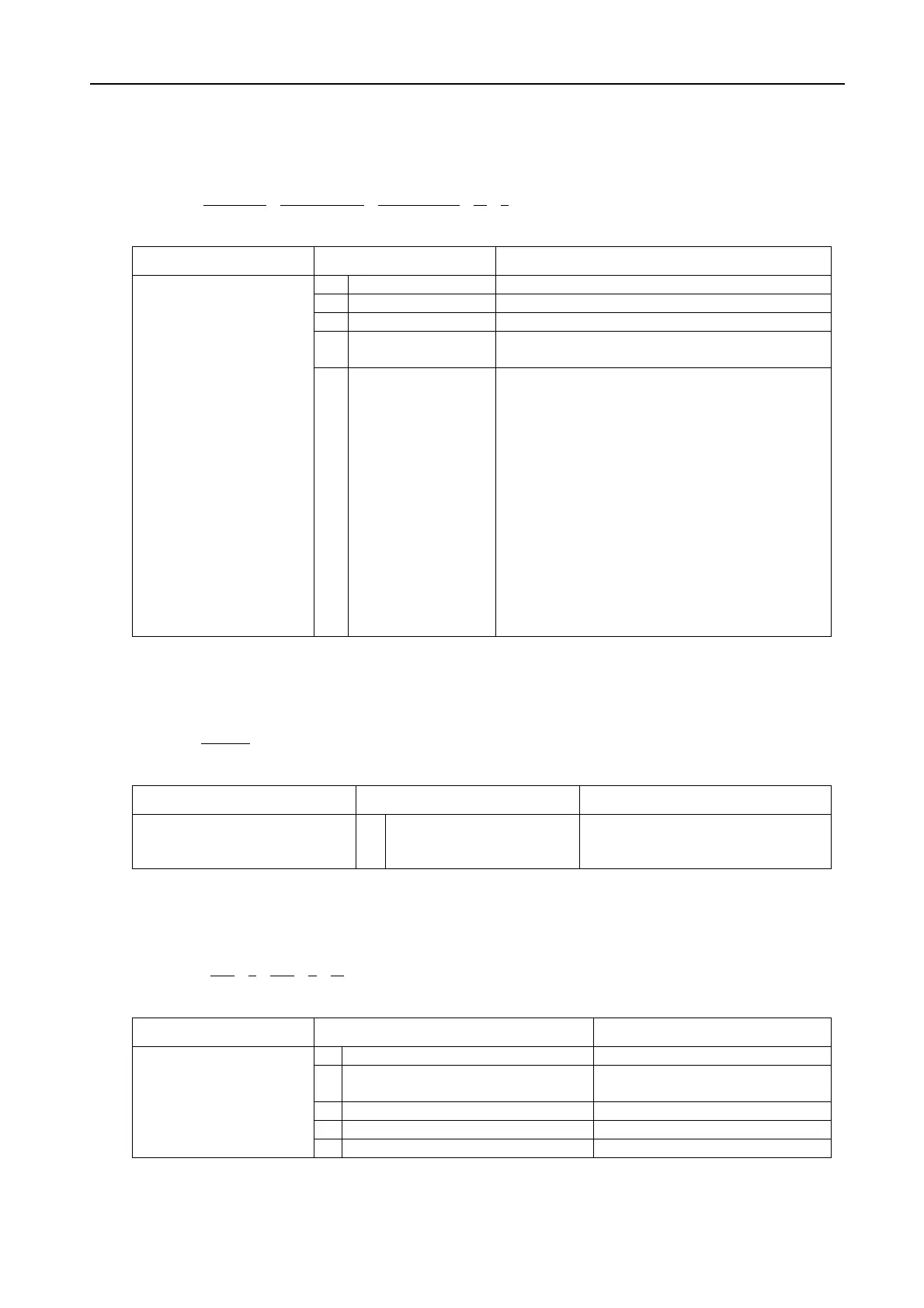
1.2.9 GLL - Geographic position, latitude/longitude
$--GLL , llll.lll , a , yyyyy.yy, a , hhmmss.ss , A , a *hh<CR><LF>
1 2 3 4 5
Contents Data Note
1 Latitude, N/S
2 Longitude, E/W
3 UTC of position
4 Status
A=data valid
V=data invalid
Latitude and Longitude of
vessel position, time of
position fix and status.
5 Mode indicator
Positioning system Mode indicator:
A= Autonomous mode
D= Differential mode
E= Estimated (dead reckoning) mode
M= Manual input mode
S= Simulator mode
N= Data not valid
The position system Mode indicator field
supplements the positioning system Status field,
the Status field shall be set to V= invalid for all
values of Indicator mode except for
A= Autonomous and D= Differential.
The positioning system Mode indicator and Status
field shall not be null fields.
1.2.10 HDT - Heading, true
$--HDT, x.x , T *hh<CR><LF>
1
Contents Data Note
Actual vessel heading in degrees
True produced by any device or
system producing true heading.
1 Heading, degrees true
1.2.11 MWV - Wind speed and angle
$--MWV, x.x , a , x.x , a , A *hh<CR><LF>
1 2 3 4 5
Contents Data Note
1 Wind angle, 0 to 359 (degrees)
2 Reference
R= relative
T= true
3 Wind speed
4 Wind speed units, K/M/N
Water temperature
5 Status A= data valid
 Loading...
Loading...