8.3 Opmisaon of motor control
Optimisation of the control loopsOptimisation of motor controlSetting of motor data Motor control selection
The inverter provides dierent funcons by means of which the drive behaviour can be fur-
ther opmised.
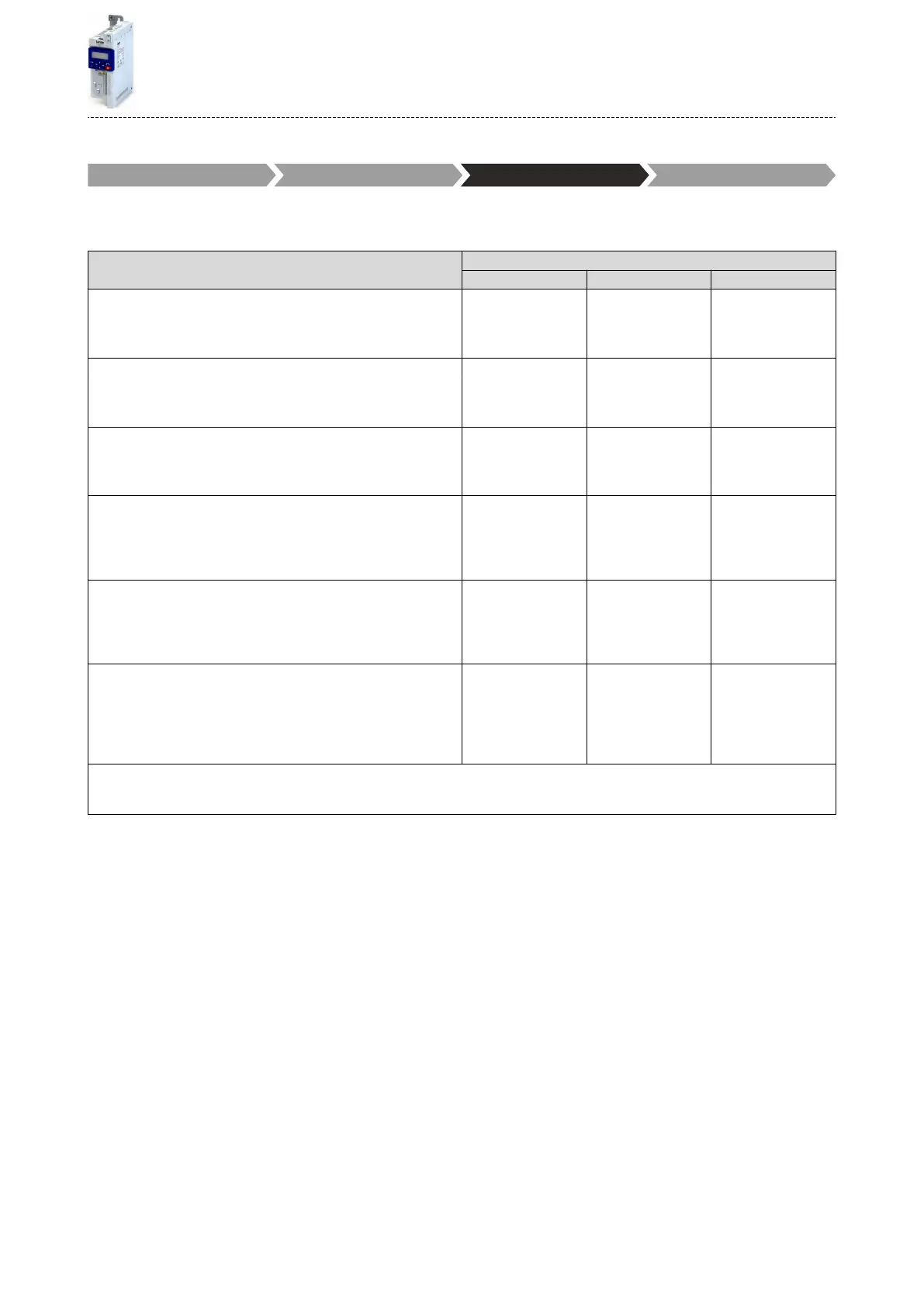
Funcon Motor control type
VFC open loop SL-PSM SLVC
V/f voltage boost ^ 130
l
The parameterisable voltage boost makes it possible to
improve the starng performance for applicaons requiring
a high starng torque.
Skip frequencies ^ 131
l l l
By means of the three parameterisable skip frequencies,
crical frequencies can be suppressed which lead to
mechanical resonances in the system.
Opmising the stalling behaviour ^ 133
l
For special motors which enable an operaon in the eld
weakening range, the behaviour in the eld weakening
range can be adapted to the motor.
Slip compensaon ^ 135
l
In case of a load, the speed of an asynchronous motor
decreases. This load-dependent speed drop is called slip.
The slip compensaon serves to counteract the load-
dependent speed loss.
Oscillaon damping ^ 137
l
The oscillaon damping serves to reduce the oscillaons
during no-load operaon which are caused by energy oscil-
lang between the mechanical system (mass inera) and
the electrical system (DC bus).
l
For controlling a permanent-magnet synchronous motor, the
pole posion - the angle between the motor phase U and
the eld axis of the rotor - must be known. This funcon
serves to detect the pole posion for the currently acvated
motor encoder.
VFC open loop
SL-PSM
SLVC
= V/f characterisc control
= sensorless control for synchronous motor
= sensorless vector control
Motor control
Opmisaon of motor control
129
 Loading...
Loading...





