3-3
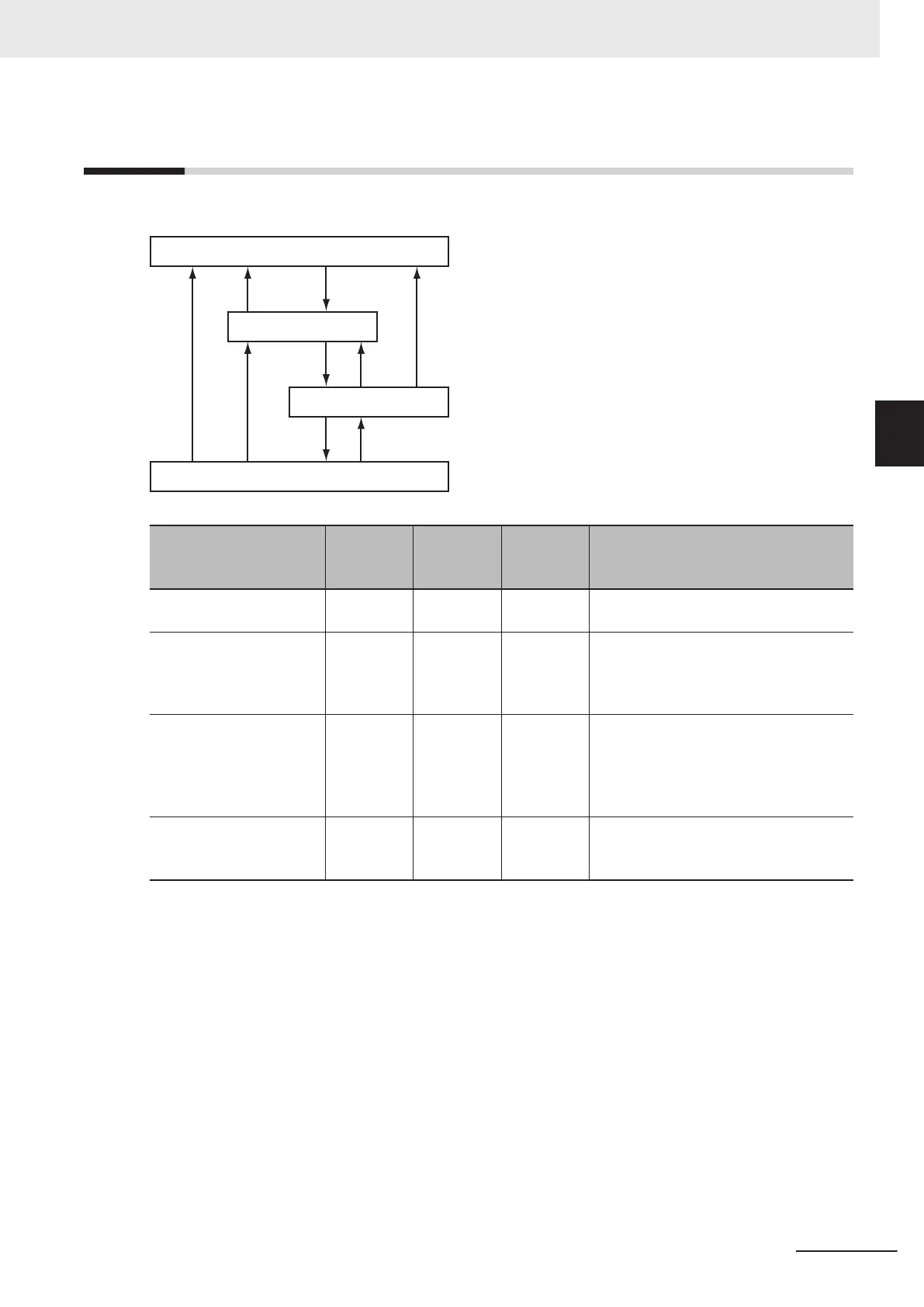
Communications Status Transitions
The EtherCAT State Machine (ESM) of the EtherCAT slave is controlled by the EtherCAT master.
Safe-Operational
Pre-Operational
Initializa
tion
Operational
State
SDO com-
munica-
tions
PDO re-
ception
PDO trans-
mission
Description
Init Not possi-
ble
Not possi-
ble
Not possi-
ble
Communication initialization is in prog-
ress. Communications are not possible.
Pre-Operational Possible Not possi-
ble
Not possi-
ble
Only SDO communications are possible
in this state. This state is entered after
initialization is completed. In this state,
the network settings are initialized.
Safe-Operational Possible Not possi-
ble
Possible In this state, PDO transmissions are
possible in addition to SDO communica-
tions. PDO transmissions can be used
to send information such as status from
the inverter.
Operational Possible
Possible Possible This is a normal operating state. PDO
communications can be used to control
the Servomotor.
Note
The Bootstrap mode is not supported.
3 EtherCAT Communications
3-5
M1 Series EtherCAT Type User’s Manual (I670)
3-3 Communications Status Transitions
3
 Loading...
Loading...



