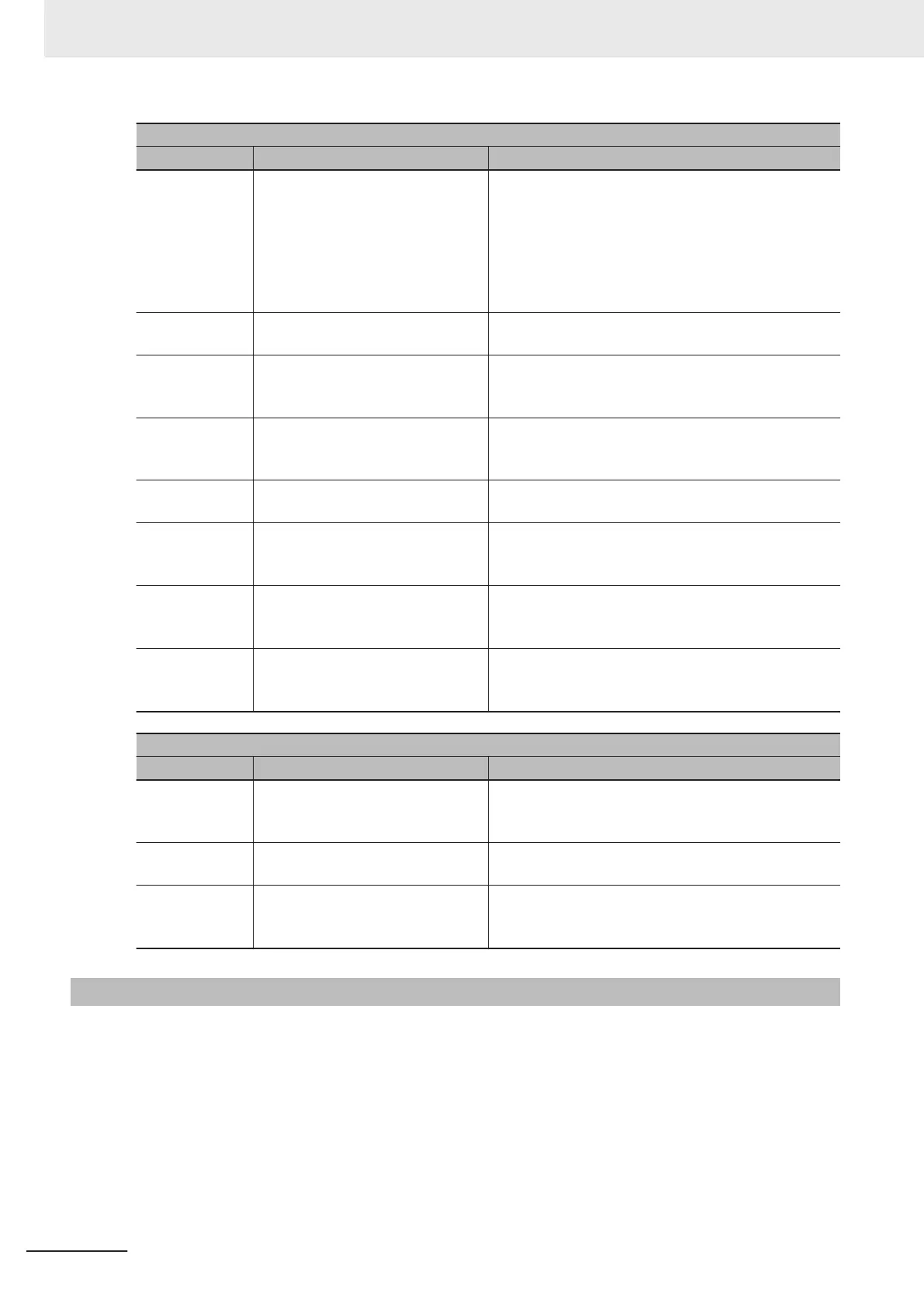
List of input terminal functions
Data Terminal function Description
137 SPD: Speed/position switching
The mode changes to the position control mode when
“SPD” is turned OFF
. The mode changes to the speed
control mode when turned ON.
This function can be operated during operation. After
positioning by position control, the state changes to a
servo lock state (in vector control) or to a DC braking
state (in V/f control).
138
ORG: Return-to-origin start up sig-
nal
The mode changes to the return-to-origin mode when
“ORG” is turned ON.
139
FOT
: Forward rotation drive prohib-
ited
The overtravel detection signal in the positive direction
is input when “FOT” is turned OFF. Use this for emer-
gency stop and return-to-origin.
140
ROT
: Reverse rotation driving pro-
hibited
The overtravel detection signal in the negative direc-
tion is input when “ROT” is turned OFF. Use this for
emergency stop and return-to-origin.
141
PCLR: Current position clear
The current position is cleared to zero when “PCLR” is
turned ON.
142 PSET: Current position preset
When “PSET” is turned ON, the current position is tak-
en as Preset Position (MSB) (3037Hex-29Hex) and
Preset Position (LSB) (3037Hex-2AHex).
144
POS-SET: Position change com-
mand
When “POS-SET” is turned ON, the target position is
changed, and movement to the new target position is
started.
145
146
147
CP1: Position command selection 1
CP2: Position command selection 2
CP3: Position command selection 3
Select Positioning Data 1 to 8 (3037Hex-2DHex to
3037Hex-3CHex) as a combination of these.
List of output terminal functions
Data Terminal function Description
82 POK: Positioning completed
This turns ON at completion of positioning (position
deviation is Positioning Completed Range
(3037Hex-28Hex) or less).
151 OT-OUT: Overtravel detection
This turns ON when the software overtravel was de-
tected or the overtravel detection signal was accepted.
152 STOP-OUT: Forced stop detection
This turns ON when a forced deceleration stop is
made by a multifunction input function “ST
OP” or de-
tection of an overtravel.
7-7-2
Position Control Gain
Position control generates the torque command and speed command to drive the inverter based on
the deviation between the current position and command position according to operation patterns that
are generated from position data (target position). Basically
, position control assumes that speed con-
trol has already been adjusted under a real load and that acceleration and deceleration are possible
without any problem. Position control gain adjusts the response of position control. To increase re-
sponse, set larger values in Position Loop Gain 1 (3037Hex-04Hex) and Position Loop Gain 2
(3037Hex-05Hex). Setting too large a value causes hunting or overshooting. To switch the gain at low
speed and high speed, set the switching frequency in Position Loop Gain Switch Frequency
7 Vector Control and Applied Functions
7-38
M1 Series EtherCAT Type User’s Manual (I670)
 Loading...
Loading...



