8-1
Status Monitors
This section describes the output frequency, fault monitor during trip, and other monitor functions of
the inverter.
8-1-1
Operation Monitor
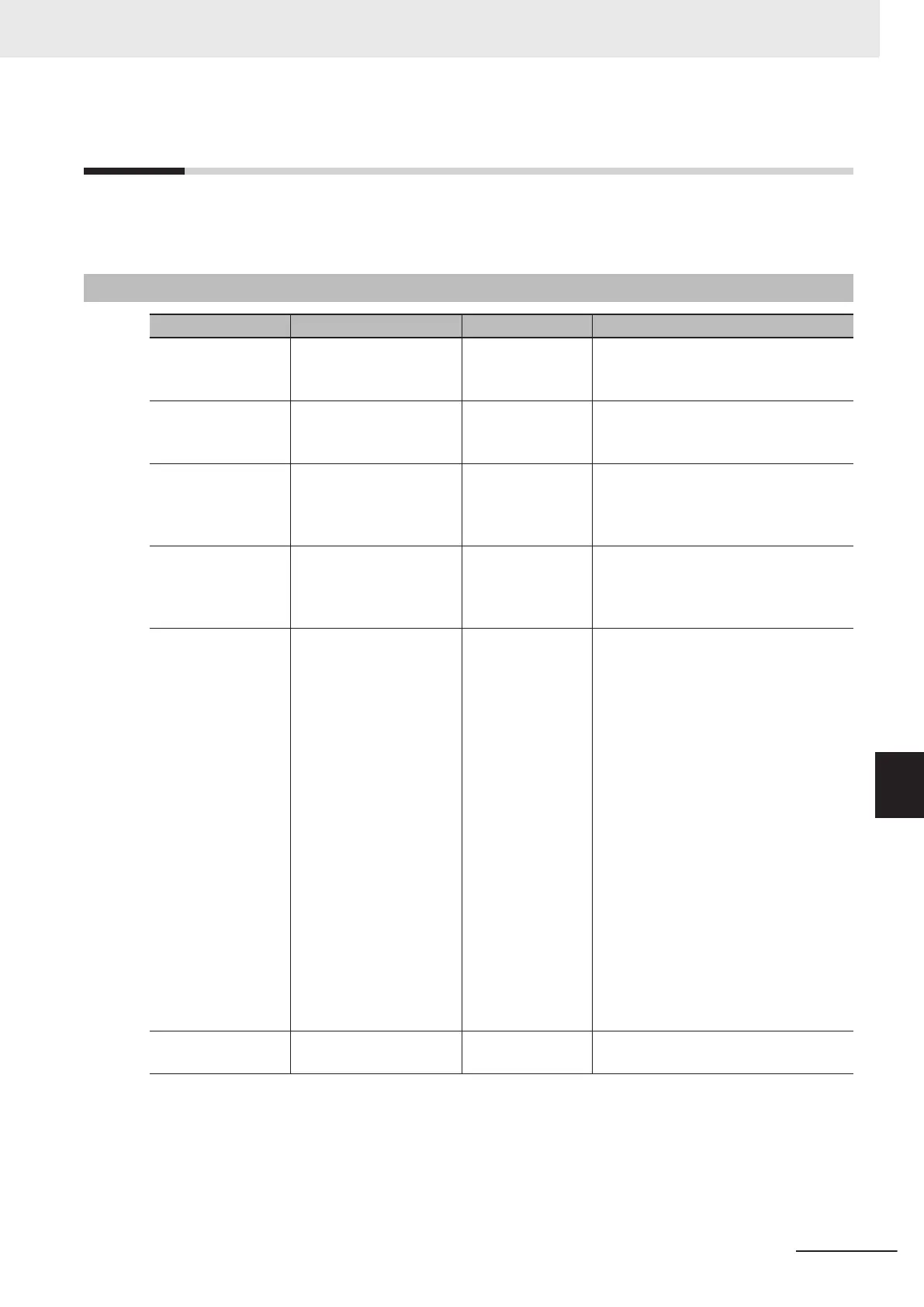
Parameter No. Item Range Display item
3010Hex-04Hex
Output Frequency Moni-
tor before Slip Compen-
sation
0.00 to 590.00
[Hz]
Output frequency 1 (before slip com-
pensation) is displayed in increments of
0.01 Hz.
3017Hex-10Hex
Output Frequency After
Slip Compensation
0.00 to 590.00
[Hz]
Output frequency 2 (after slip compen-
sation) is displayed in increments of
0.01 Hz.
3010Hex-06Hex Output Current Monitor 0.00 to 655.3 [A]
Output current effective value is dis-
played in increments of 0.01 A.
A current value of 100 A or higher is
displayed in increments of 0.1 A.
3010Hex-07Hex Output Voltage Monitor 0.0 to 999.0 [V]
The output voltage command value is
displayed in increments of 0.1 V
.
However
, the display value changes in
increments of 1.0 V.
3010Hex-08Hex Output Torque Monitor -400 to 400 [%]
The torque calculated value, torque
command value and torque current
command value are displayed in incre-
ments of 1%.
• Rated motor torque ratio of torque
calculated value in the case of V/f
control and dynamic torque vector
control
• Speed control mode of vector control:
Rated motor torque ratio of speed
control output (after torque bias)
• When the torque command is used in
the torque control mode of vector
control: Rated motor torque ratio of
torque command value
• When the torque current command is
used in the torque control mode of
vector control: Rated motor current
ratio of torque current command val-
ue
3010Hex-03Hex
Frequency Reference
Monitor
0.00 to 590.00
[Hz]
Displays the set frequency in incre-
ments of 0.01 Hz.
8 Other Functions
8-3
M1 Series EtherCAT Type User’s Manual (I670)
8-1 Status Monitors
8
8-1-1 Operation Monitor
 Loading...
Loading...



