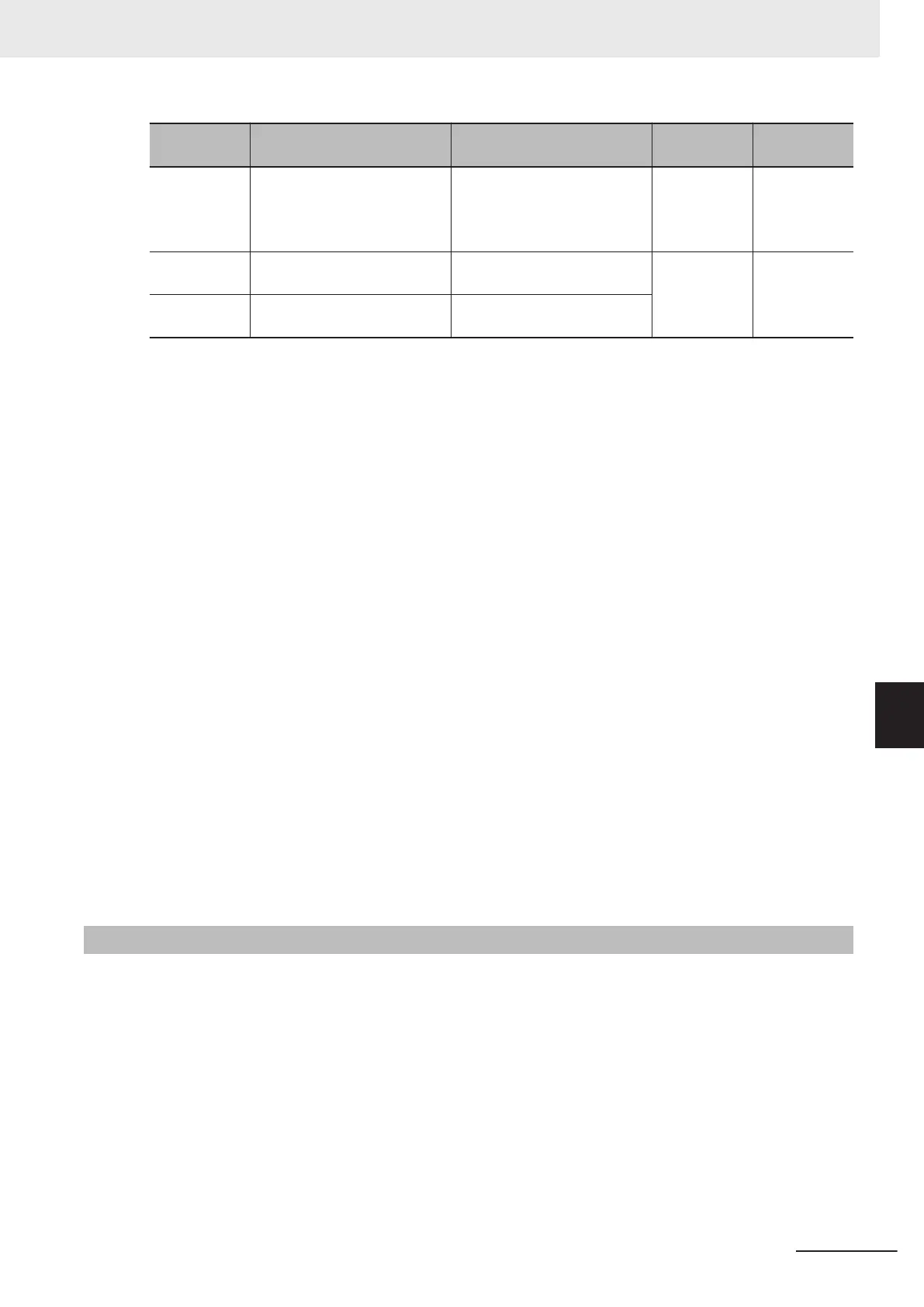
Parameter
No.
Function name Data Default data Unit
3037Hex-4EH
ex
Positioning Data Setting Se-
lection via communication
0: Disable Communications
Positioning Data (S20, S21)
0 -
1: Enable Communications
Positioning Data (S20, S21)
3002Hex-15H
ex
Positioning Data via Commu-
nication (MSB)
−268435455 to 268435455
(MSB: -4096 to 4095)
0 -
3002Hex-16H
ex
Positioning Data via Commu-
nication (LSB)
(LSB: 0 to 65535)
Positioning Data Type (3037Hex-26Hex)
Handling of the positioning data set to positioning data 1 to 8 can be switched between handling as
absolute positions or as moving amounts.
To switch handling when necessary
, use increment/absolute position switching “INC/ABS” (data =
135) in the multifunction input terminal function.
When “INC/ABS” is allocated to multifunction input terminals, the 3037Hex-26Hex setting is disa-
bled.
Position Data Determination Time (3037Hex-27Hex)
When position command selection 1 “CP1” to position command selection 3 “CP3” is switched,
chattering may cause the selected positioning data to change. In cases like these, set the time up
to settling of the positioning data to 3037Hex-27Hex.
Positioning Data Setting Selection via communication (3037Hex-4EHex)
Positioning data can also be assigned via communication. To assign positioning data via communi-
cation, set 1 to 3037Hex-4EHex. The upper four digits and lower four digits of the positioning data
are assigned to Positioning Data via Communication (MSB) (3002Hex-15Hex) and Positioning Da-
ta via Communication (LSB) (3002Hex-16Hex), respectively.
To reflect positioning data, turn the position change command “POS-SET” ON.
While commands via communication are enabled, Positioning Data 1 (MSB) (3037Hex-2DHex) and
Positioning Data 1 (LSB) (3037Hex-2EHex) are switched to 3002Hex-15Hex and 3002Hex-16Hex.
These parameters can also be switched to positioning data 2 to 8 by position command selection 1
“CP1” to position command selection 3 “CP1.”
7-7-6
Overtravel (OT)
When a movement limit point is passed through, there is the risk of mechanical failure or accident. For
this reason, the movement limit point can be detected by the hardware and input digitally as an over-
travel (OT) signal. OT detection causes a deceleration stop for the time set in Deceleration T
ime for
Forced Stop (3008Hex-39Hex) and then servos change to a locked state. When Over T
ravel Forced
Stop Operation Selection (3037Hex-51Hex) = 1, a deceleration stop is performed and then the opera-
tion error (alarm code: 24) is generated. Plus side overtravel “FOT” and minus side overtravel “ROT”
can be allocated independently. The overtravel signal is enabled (NC contact is made) when it is OFF,
for safety reasons. When an overtravel is detected, overtravel detection signal “OT-OUT” is output as
a digital output.
7 Vector Control and Applied Functions
7-43
M1 Series EtherCAT Type User’s Manual (I670)
7-7 Position Control
7
7-7-6 Overtravel (OT)
 Loading...
Loading...



