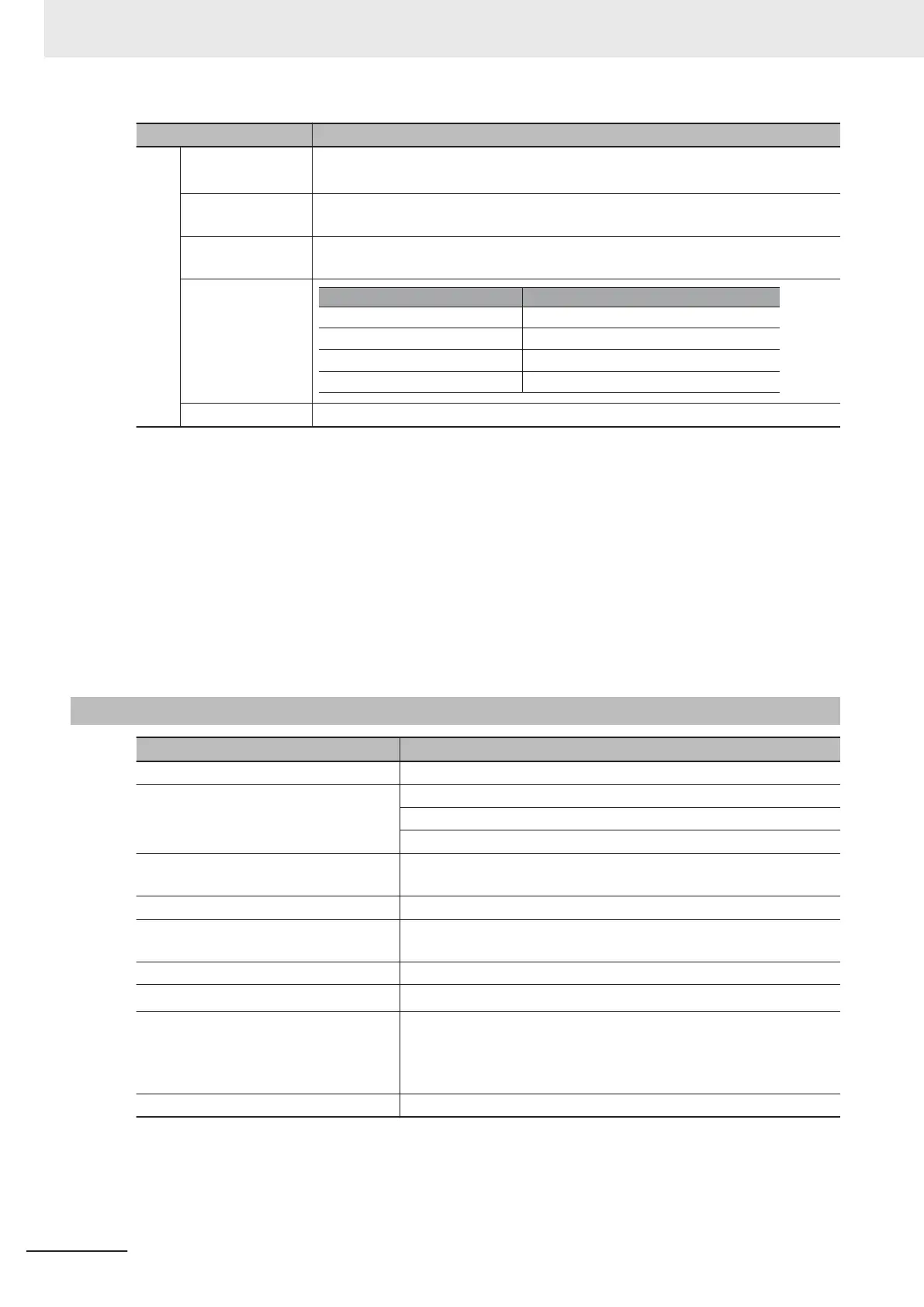
Item Specifications
Gen-
eral
spec
ifica-
tions
Operating ambient
temperature
*5
-10 to 50°C (Derating required)
Storage ambient
temperature
-25 to 70°C (Short-time temperature during shipment)
Operating ambient
humidity
5% to 95% (with no condensation)
Vibration resist-
ance
Vibration Frequency
2 to less than 9Hz
9 to less than 20Hz
20 to less than 55Hz
55 to less than 200Hz
3mm (0.12inch) (Max. amplitude)
1
G
0.2G
0.1G
Specification
Location At a maximum altitude of 1,000 m, indoors (without corrosive gases or dust)
*1. The enclosure rating complies with JISC0920.
*2. If you must use the motor at higher than 50/60 Hz, check the allowable maximum motor speed and other
information with the motor manufacturer.
*3.
In the HND/ND (light load) mode or PM motor mode compared with the HHD/HD (heavy load) mode, for
some parameters, the default data and setting range also differ. For details, refer to 6-2-2 Load Mode Selec-
tion on page 6-10.
*4. By default, the maximum frequency is adjusted to 10 V for a voltage input of 0 to 10 VDC. If necessary,
adjust the default parameter settings. For details, refer to 8-3-2 Analog Input Adjustment Function on page
8-34.
*5. Derating of the rated output current of the inverter may be required depending on the heavy/light load mode
selection, operating ambient temperature, side-by-side installation, and carrier frequency settings.
Use the inverter in an appropriate environment according to A-7 Derating Table on page A-287.
1-3-2
EtherCAT Communication Specifications
Item Specifications
Physical layer 100BASE-TX (IEEE802.3)
Connector RJ45 × 2 (shielded type)
ECAT IN: EtherCAT input
ECAT OUT: EtherCAT output
Communications media Category 5 or higher (cable with double, aluminum tape and braided
shielding) is recommended.
Communications distance Distance between nodes: 100 m max.
Process data Fixed PDO mapping
User PDO mapping
Mailbox (CoE) Emergency messages, SDO requests, and SDO responses
Synchronization mode
FreeRun mode
*1
LED display L/A IN (Link/Activity IN) × 1
L/A OUT (Link/Activity OUT) × 1
RUN × 1
ERR × 1
CiA402 drive profile Velocity mode
*1. In FreeRun mode, slaves perform I/O processing, i.e., refresh I/O data asynchronously with the communica-
tions cycle of the master. The communications cycle is determined by the cycle time of the master. For the
communications response time of the EtherCA
T Communication Unit, refer to A-6 Communications Re-
sponse Time on page A-286.
1 Overview
1-16
M1 Series EtherCAT Type User’s Manual (I670)
 Loading...
Loading...



