When “PCLR” is turned ON during position control operation, the current position is cleared to zero
and movement to the target position is performed. When “PCLR” is turned ON after position control
stop, the current position is cleared to zero, however, movement to the target position is not started. T
o
perform movement, either turn the RUN command OFF then back ON again, or turn “POS-SET” ON.
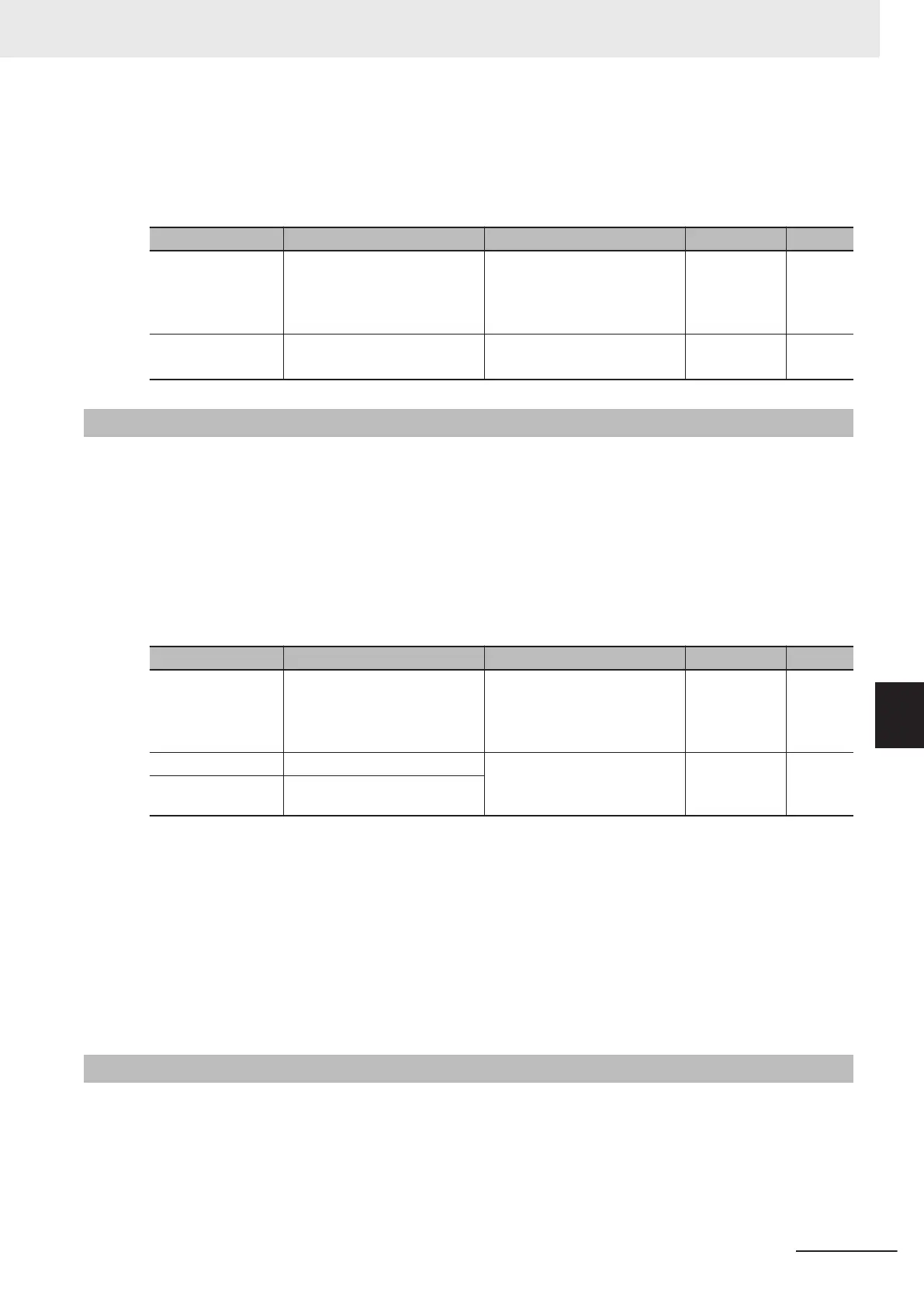
Parameter No. Function name Data Default data Unit
3005Hex-02Hex to
3005Hex-06Hex
3005Hex-63Hex
3005Hex-64Hex
Input Terminal [DI1] Function
Selection to Input Terminal
[DI7] Function Selection
141 (1
141): Current position
clear “PCLR”
- -
3037Hex-16Hex
Current Position Clear Signal
Operation Selection
0: Clear at edge detection
0 -
1: Clear at level detection
7-7-10
Position preset
The current position can be overwritten by the setting of Preset Position (MSB) (3037Hex-29Hex) and
Preset Position (LSB) (3037Hex-2AHex) at the ON edge of digital input “PSET
.” The current position
can be preset in either position control and speed control.
When “PSET” is turned ON during position control operation, the current position is overwritten by the
preset position and movement to the target position is performed. When “PSET” is turned ON after po-
sition control stop, the current position is overwritten, however, movement to the target position is not
started. T
o perform movement, either turn the RUN command OFF then back ON again, or turn “POS-
SET” ON.
Parameter No. Function name Data Default data Unit
3005Hex-02Hex to
3005Hex-06Hex
3005Hex-63Hex
3005Hex-64Hex
Input Terminal [DI1] Function
Selection to Input Terminal
[DI7] Function Selection
142 (1
142): Current position
preset “PSET”
- -
3037Hex-29Hex Preset Position (MSB) −268435455 to 268435455
(MSB: -4,096 to 4,095, LSB: 0
to 65,535)
0 -
3037Hex-2AHex Preset Position (LSB)
Position control by pulse train input
Position control can be performed with pulse train input used as the pulse position command.
When digital input “SPD” is turned OFF with “12: Pulse train input” set to 1st Frequency Reference
Selection (3004Hex-02Hex)/2nd Frequency Reference Selection (3006Hex-1FHex), position con-
trol is made to operate by taking the pulses according to the pulse train input as the position com-
mand pulse.
For details on the pulse train input method, refer to 8-9-17 Pulse T
rain Frequency Input on page
8-129.
7-7-11
Orientation
The orientation function can be used as an applied function for position control. In speed control, ori-
entation can be performed during operation or while operation is stopped.
Orientation during speed control
With speed control, a motor in rotation can be stopped at a desired mechanical position. When digi-
tal input “ORT” is turned ON (2) during operation in speed control, deceleration is performed up to
7 Vector Control and Applied Functions
7-49
M1 Series EtherCAT Type User’s Manual (I670)
7-7 Position Control
7
7-7-10 Position preset
 Loading...
Loading...



