Appendices
A-8
NJ-series CPU Unit Software User’s Manual (W501)
Motion
control
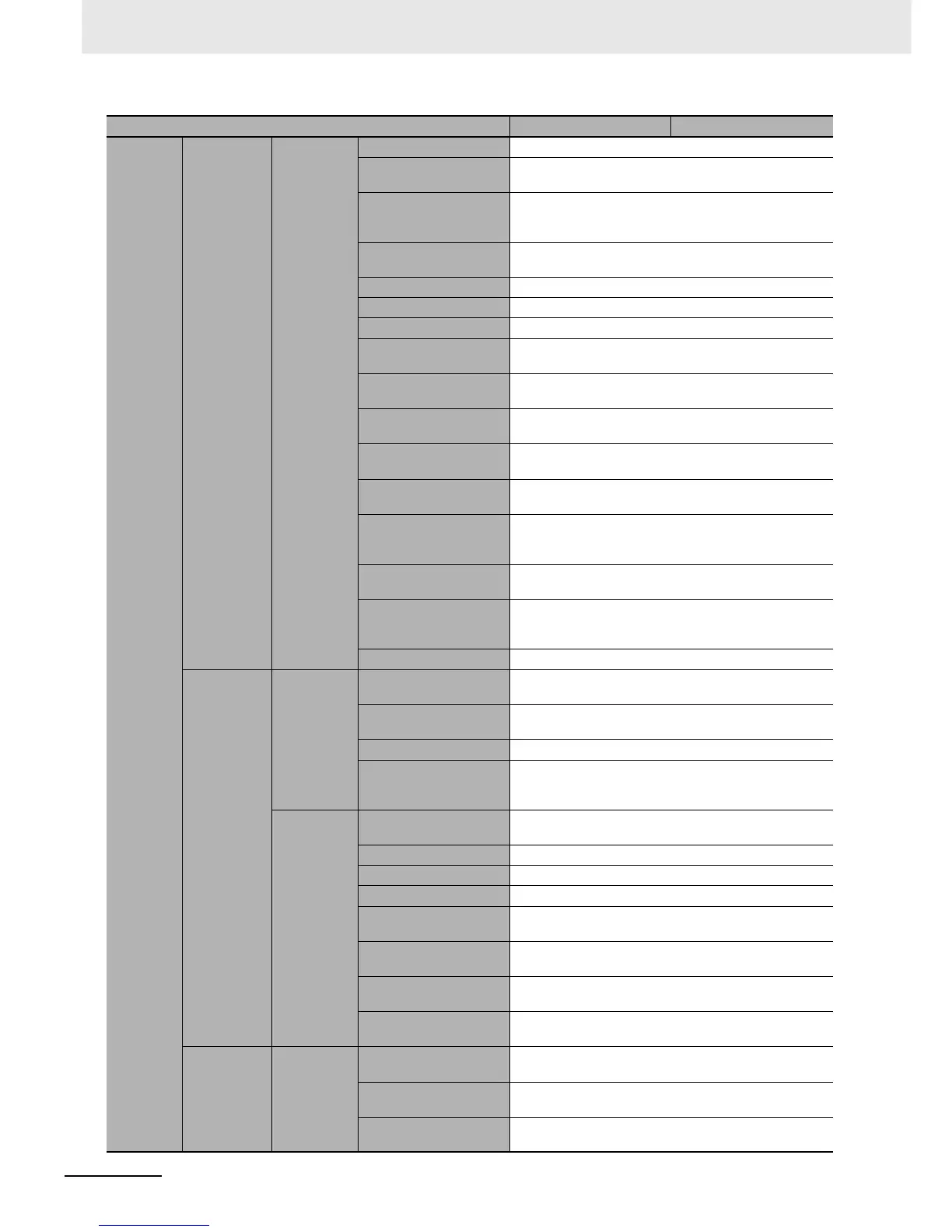
Single axes
Auxiliary
functions for
single-axis
control
Resetting axis errors Axes errors are cleared.
Homing
A motor is operated and the limit signals, home proximity
signal, and home signal are used to define home.
Homing with specified
parameters (*)
The parameters are specified, the motor is operated, and the
limit signals, home proximity signal, and home signal are
used to define home.
High-speed homing
Positioning is performed for an absolute target position of 0
to return to home.
Stopping An axis is decelerated to a stop.
Immediately stopping An axis is stopped immediately.
Setting override factors The target velocity of an axis can be changed.
Changing the current
position
The command current position or actual current position of
an axis can be changed to any position.
Enabling external
latches
The position of an axis is recorded when a trigger occurs.
Disabling external
latches
The current latch is disabled.
Zone monitoring
You can monitor the command position or actual position of
an axis to see when it is within a specified range (zone).
Enabling digital cam
switches*
You can turn a digital output ON and OFF according to the
position of an axis.
Monitoring axis follow-
ing error
You can monitor whether the difference between the com-
mand positions or actual positions of two specified axes
exceeds a threshold value.
Resetting the following
error
The error between the command current position and actual
current position is set to 0.
Torque limit
The torque control function of the Servo Drive can be
enabled or disabled and the torque limits can be set to con-
trol the output torque.
Start velocity* You can set the initial velocity when axis motion starts.
Axes groups
Multi-axes
coordinated
control
Absolute linear interpo-
lation
Linear interpolation is performed to a specified absolute
position.
Relative linear interpola-
tion
Linear interpolation is performed to a specified relative posi-
tion.
Circular 2D interpolation Circular interpolation is performed for two axes.
Axes group cyclic syn-
chronous absolute posi-
tioning (*)
A positioning command is output each control period in Posi-
tion Control Mode.
Auxiliary
functions for
multi-axes
coordinated
control
Resetting axes group
errors
Axes group errors and axis errors are cleared.
Enabling axes groups Motion of an axes group is enabled.
Disabling axes groups Motion of an axes group is disabled.
Stopping axes groups All axes in interpolated motion are decelerated to a stop.
Immediately stopping
axes groups
All axes in interpolated motion are stopped immediately.
Setting axes group over-
ride factors
The blended target velocity is changed during interpolated
motion.
Reading axes group
positions (*)
The command current positions and actual current positions
of an axes group can be read.
Changing the axes in an
axes group (*)
The Composition Axes parameter in the axes group parame-
ters can be overwritten temporarily.
Common
items
Cams
Setting cam table prop-
erties
The end point index of the cam table that is specified in the
input parameter is changed.
Saving cam tables
The cam table that is specified with the input parameter is
saved in non-volatile memory in the CPU Unit.
Generating cam tables (*)
The cam table is generated from the cam property and cam
node that is specified in input parameters.
Item NJ501- NJ301-

 Loading...
Loading...












