2-21
2 CPU Unit Operation
NJ-series CPU Unit Software User’s Manual (W501)
2-4 Sequence Control and Motion Control
2
2-4-3 Motion Control System
This section describes the operation of the function modules and the control period as part of the
motion control system.
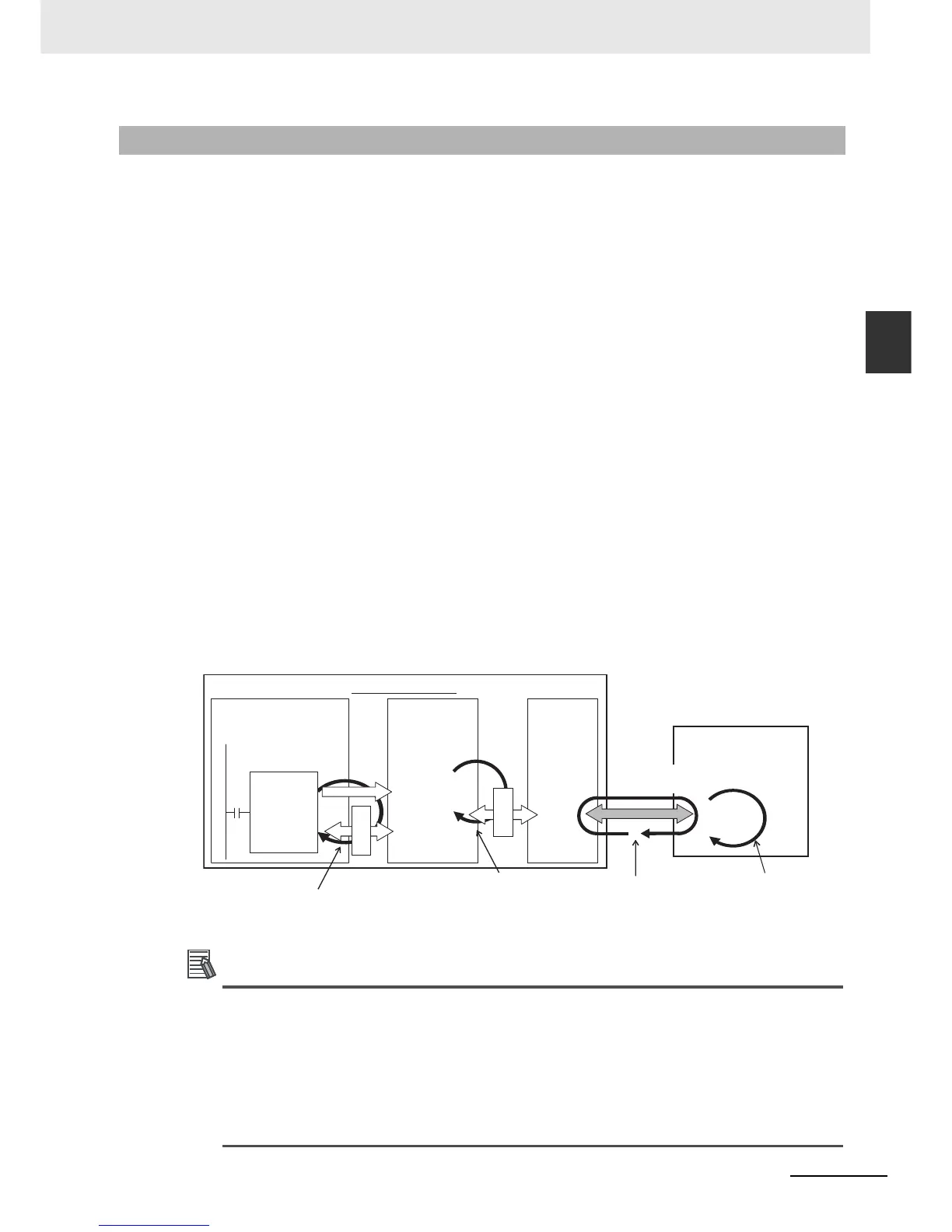
Operation of Function Modules
• The PLC Function Module executes motion control instructions in the user program and sends
commands for motion control to the Motion Control Function Module. Axis variables are used for
these commands.
• The Motion Control Function Module performs motion control processing based on commands
from the PLC Function Module. It then reflects the results of this processing in the Axis variables.
• The EtherCAT Master Function Module sends the command values of the Axis variable to the
Servo Drive or other slave by using EtherCAT communications.
Control Period
The motion control period is the task period of the primary periodic task.
Motion control processing in the Motion Control Function Module is executed in the task period of
the primary periodic task. The Motion Control Function Module also exchanges data with Servo
Drive and encoder input slaves that are assigned to the axes to control in the process data commu-
nications cycle. The process data communications cycle is synchronized with the primary periodic
task.
This makes the motion control period the same as the task period of the primary periodic task, which
allows complete synchronization of multiple axes.
However, the following restrictions apply:
• The motion control instruction is executed and the command for motion control is sent in the
sequence control period.
• The data refresh period in the EtherCAT slave depends on settings in the slave.
• You must use the Sysmac Studio to assign an axis to an EtherCAT slave to control it from the
Motion Control Function Module. This allows the PLC Function Module to send commands to
the Motion Control Function Module for motion control instructions that are executed in the
user program. It also allows the PLC Function Module to obtain information from the Motion
Control Function Module through the Axis variables.
• The task to which the program that contains the motion control instructions is assigned deter-
mines the I/O response time of the motion control system. For details, refer to 5-3-4 System
Input and Output Response Times.
2-4-3 Motion Control System
NJ-series CPU Unit
Executed.
EtherCAT
Master
Function
Module
Motion Control
Function
Module
Motion
control
processing
Command
PLC Function Module
User program execution
Motion
control
instruction
Axis variable
Sequence control period (task period
of the primary periodic task or the
priority-16 periodic task)
Axis variable
Motion control period =
(i.e., task period of the
primary periodic task)
The process data communica-
tions cycle is the same as the
task period of the primary
periodic task.
Data refresh
period in slave
EtherCAT
communications
Servo Drive and encoder
input slaves that are
assigned to axes