DVP-ES3/EX3/SV3/SX3 Series Hardware and Operation Manual
11-4
11.6 EtherCAT Master
1. DVP32ES300TEC CPU can connect to 16-axis Delta servo (ASDA-A2-E, ASDA-A3-E and ASDA-B3-E) and Delta
inveter (C2000 and CH2000 Series).
2. After establishing the physical wiring between the EtherCAT communication port and the EtherCAT slave, complete
the initialization of EtherCAT communication with API2820 INITEC instruction before using EtherCAT communication.
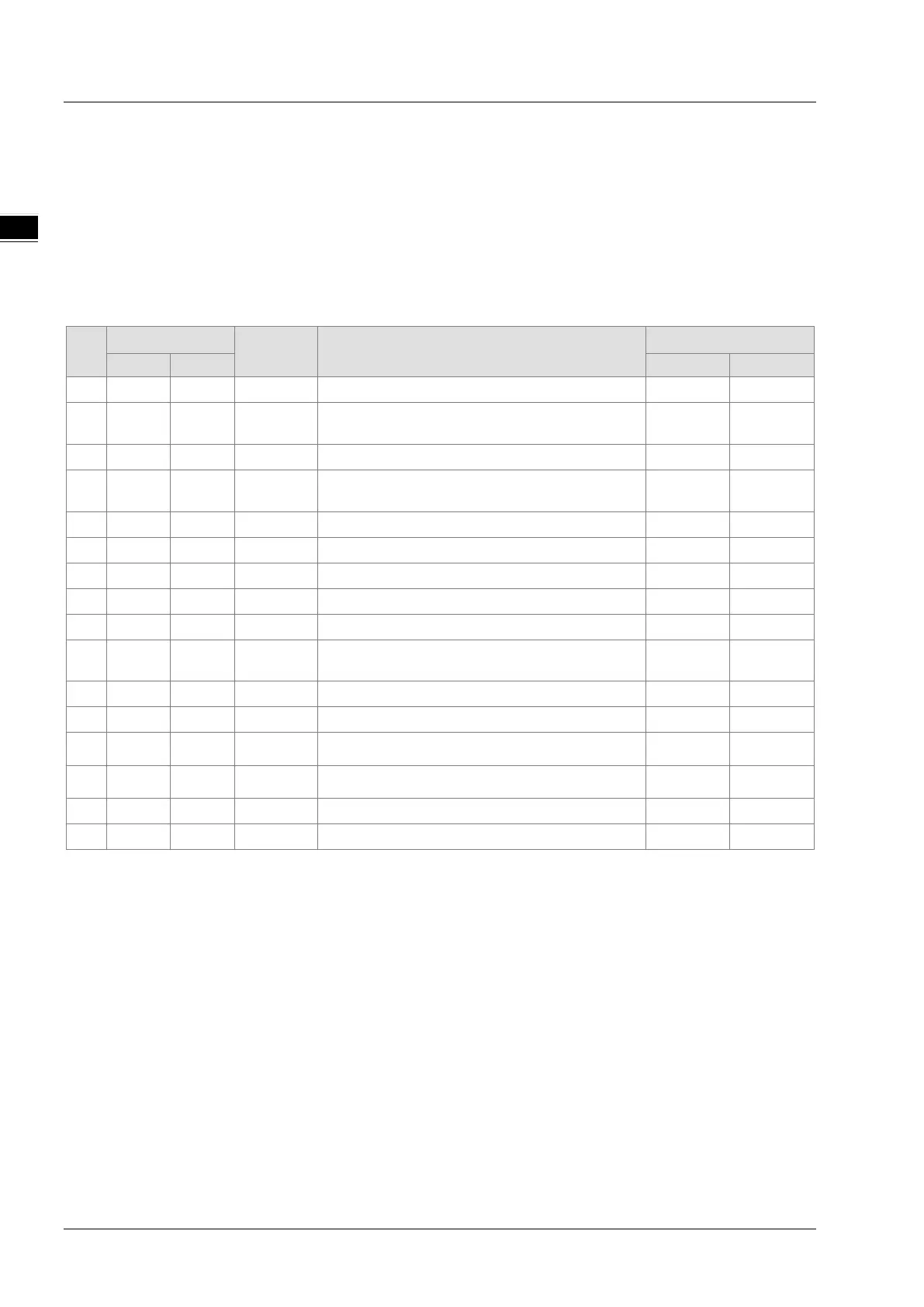
3. The following EtherCAT instructions are supported. Refere to Section 6.27 Delta CANopen Communication
Instructions in ES3/EX3/SV3/SX3 Series Programming Manual for more details.
API
Instruction code
Pulse
instruction
Function
EtherCAT
2801
ASDON – – Servo-ON and Servo-OFF
V V
2802
CASD – –
Setting the acceleration time and deceleration time
V V
2803
– DDRVIC
– Servo relative position control
V –
2804
–
DDRVA
– Servo absolute position control
V –
2805
– DPLSVC
– Servo speed control
V V
2806
ZRNC DZRNC – Servo homing
V –
2809
RSTD – – Sending Reset or NMT command
V V
2810
ZRNM – – Setting the homing mode for Delta servo
V –
2811
EMER – – Reading Emergency message
V V
2812
– DCSFOC
–
Controlling the tracking function of a servo via
communication
V –
2817
– DTQC – Torque control V –
2818
– DTQLC – Speed of torque control V –
2820
INITEC – –
Initializing the slaves for EtherCAT
communication
V V
2821
– Reading and writing EtherCAT SDO data V V
2822
MOTST – – Reading Motion state of an EtherCAT slave V V
2823
ECATST
– – Reading the state of an EtherCAT slave V V
4. After the EtherCAT communication initialization is completed, if the PLC switches from RUN to STOP, the EtherCAT
master function will be turned off. At this time, the EtherCAT communication port can be used as a MODBUS TCP
slave or used for web page functionality.

 Loading...
Loading...








