3Explanation of operation methods
Operation of the origin and the brake screen 3-85
3.16 Operation of the origin and the brake screen
(1) Origin
If the origin position has been lost or deviated when the parameters are lost or due to robot interference,
etc., the robot origin must be set again using this function.
Refer to the separate manual: "Robot arm setup & maintenance" for details on the operation.
(2) Brake
In the state of servo off, it is the function to release the brake of the servo motor. Refer to the Page 60, "3.9
Turning the servo ON/OFF" for servo off operation.
Use it, if it moves the robot arm directly by hand.
Due to the robot configuration, when the brakes are released, the robot arm will
drop with its own weight depending on the released axis.
Always assign an operator other than the T/B operator to prevent the arm from
dropping. This operation must be carried out with the T/B operator giving signals.
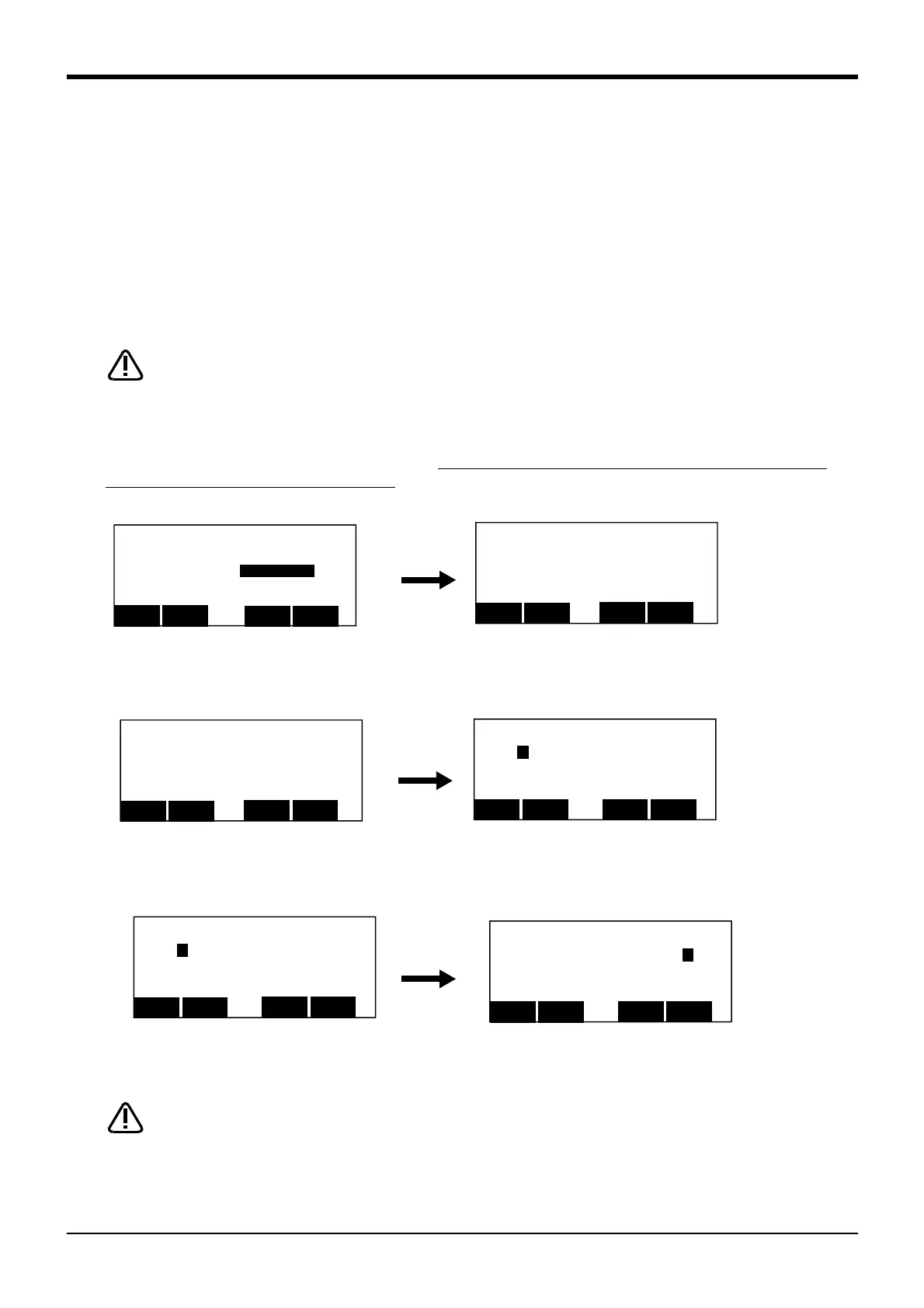
The operation method is shown in the following. Perform this operation, in the condition that the enabling
switch (3 position switch) is pushed lightly.
1) Press the [4] key in the <menu> screen, and display the <ORIGIN/BRAKE> screen.
2) Press the [2] key in the <ORIGIN/BRAKE> screen, and display the <BRAKE> screen.
3) Input "1" into the axis which release the brake.
Due to the robot configuration, when the brakes are released, the robot arm will
drop with its own weight depending on the released axis.
Always assign an operator other than the T/B operator to prevent the arm from
dropping. This operation must be carried out with the T/B operator giving signals.
<MENU>
1.FILE/EDIT 2.RUN
3.PARAM.
4.ORIGIN/BRK
5.SET/INIT. 6.ENHANCED
CLOSE
123
<ORIGIN/BRAKE>
1.ORIGIN 2.BRAKE
CLOSE
123
<BRAKE>
J1:( 0 )J2:( 0 )J3:( 0 )
J4:( 0 )J5:( 0 )J6:( 0 )
J7:( 0 )J8:( 0 )
CLOSE
123
REL.
<ORIGIN/BRAKE>
1.ORIGIN 2.BRAKE
CLOSE
123
<BRAKE>
J1:( 0 )J2:( 0 )J3:( 1 )
J4:( 0 )J5:( 0 )J6:( 0 )
J7:( 0 )J8:( 0 )
CLOSE
123
REL.
<BRAKE>
J1:( 0 )J2:( 0 )J3:( 0 )
J4:( 0 )J5:( 0 )J6:( 0 )
J7:( 0 )J8:( 0 )
CLOSE
123
REL.
 Loading...
Loading...



