5Functions set with parameters
Interference avoidance function 6-539
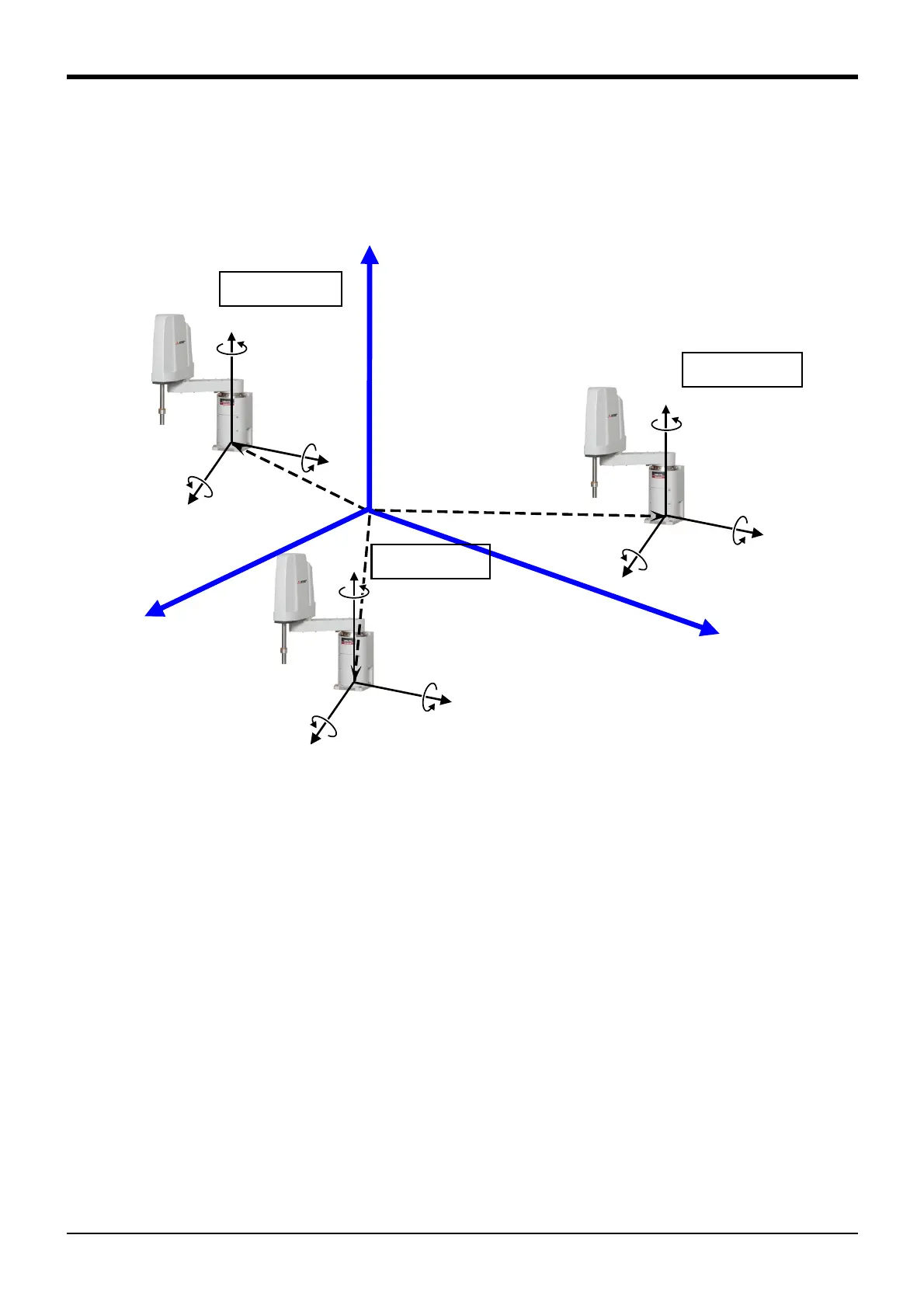
5.24.7 Calibration between robots (Checking for interference between robots)
Set the positional relation for multiple robots which are using the interference avoidance function.
Set a common coordinate system origin point between the robots based on the system layout drawing, etc.
Then, set the Base coordinate system origin point of each robot in parameter: RBCORD looking from that
common coordinate system.
Fig.5-25:Image of calibration between robots
+Z
+X
+Y
+Zb3
+Xb3
+Yb3
+Zb2
+Xb2
+Yb2
+Zb1
+Xb1
+Yb1
*1)
*1)
*1)
Robot 3 base
coordinate system
Rotation angle
Zb3
Rotation angle
Bb3
Rotation angle
Ab3
Robot 1 base
coordinate system
Robot 2 base
coordinate system
Rotation angle
Zb1
Rotation angle
Bb1
Rotation angle
Ab1
Rotation angle
Zb2
Rotation angle
Bb2
Rotation angle
Ab2
*1) The robot's base coordinate system origin point looking from the common coordinate system.
Set these coordinate values in parameter: RBCORD for each robot.
 Loading...
Loading...



