7Appendix
Spline interpolation Appendix-621
If spline cancel is disabled or if the cancel angle is set to a large value, the spline
curve will not be split where the movement direction changes greatly, and the
robot will not decelerate. This can cause the robot to vibrate or a servo error to
occur.
If the spline curve bends and breaks (zigzag), the interpolation position may not
be calculated and error L2163 (spline interpolation command calculation error)
may occur.
Check the path point positions and set the appropriate cancel angle.
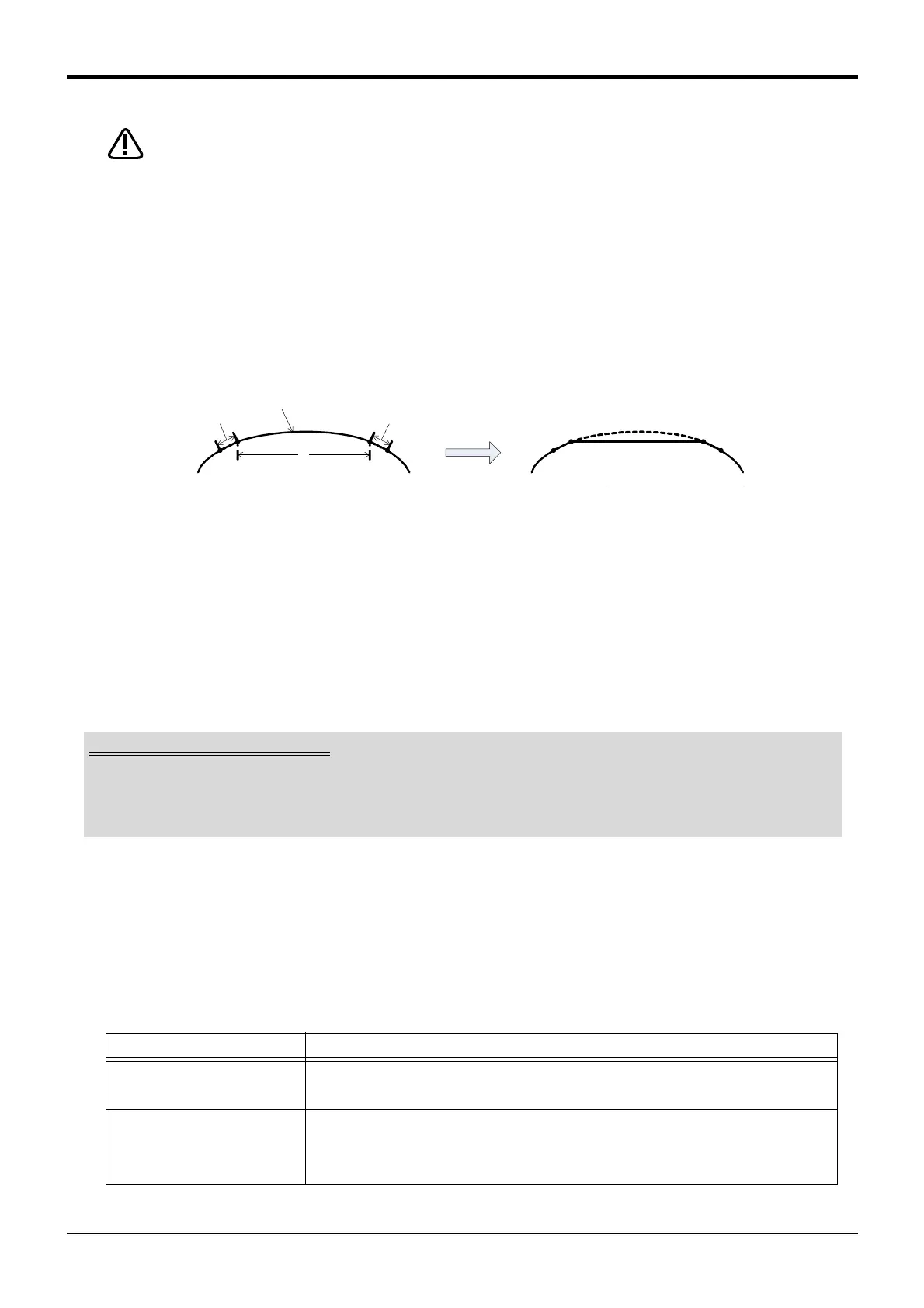
■Block length ratio
If the block length is extremely long in respect to an adjacent block, that block can automatically be moved
as a linear block instead of a spline curve.
Fig.7-19:Linearization by block length ratio
If the block n length L
n
is longer than the designated length compared to the adjacent block length L
n-1
or
L
n+1
, block n will be linear.
The block length ratio setting range is as follows. This can be set individually for each spline interpolation.
Setting range: 0 to 100 fold (1-fold unit)
* The block length ratio does not function when 0-fold is designated.
* The default value is 8-fold.
Even if tolerance is set for a block that is linear because of the block length ratio, the block length ratio func-
tion will have priority.
(2) Operation mode
With spline interpolation, the robot is operated to move through control points while maintaining the desig-
nated speed. If the designated speed is high, or if the posture variation amount in respect to the distance
between path points is large, the speed may be exceeded during the movement.
An operation mode is available so that in such cases, the designated speed is not maintained but the robot
moves while not generating an excessive speed when possible. There are two operation modes as shown
in Table 7-6.
Table 7-6:Operation mode
Operation mode Explanation
Constant linear speed The robot moves at the designated speed and maintains the constant speed. The speed may
be exceeded during the movement depending on the designated speed or posture variation
amount.
Variable linear speed The robot moves at the designated speed and maintains the constant speed. However, if it is
judged that the speed may be exceeded during the movement, control is applied so that the
movement speed is automatically lowered and the speed is not exceeded. The speed returns
to the originally designated speed when the possibility of over speed is eliminated.
* It may not be possible to suppress the over speed depending on the movement state.
経路点
n-1
nn+1
n+2
L
n
L
n- 1
L
n+1
n-1
nn+1
n+2
ブロックn
直線化
L
n
> L
n-1
×比率 または L
n
> L
n+1
×比率
Path point
Block n
Linearization
L
n
> L
n-1
× ratio or L
n
> L
n+1
× ratio
Precautions for path adjustment
The curve onto which path adjustment has been applied and the connection of the previous and next
curve are not as smooth as the connections of spline curves that have not been adjusted. Thus, depend-
ing on the state of the connection and the speed command, the speed may fluctuate at the curve con-
nections.
 Loading...
Loading...



