3-44 Programming
3Explanation of operation methods
(7) Confirming the position data (Position jump)
Move the robot to the registered position data place.
The robot can be moved with the "joint mode" or "XYZ mode" method.
Perform a servo ON operation while lightly holding the deadman switch before moving positions.
Table 3-4:Moving to designated position data
The operation method is shown in the following.
Do this operation by maintaining the servo-on state, carrying out servo-on and holding the enabling switch
(3 position switch) lightly.
1) Display the position variable to make it move beforehand.
Press the function key corresponding to "MOVE", then move the robot to position which currently dis-
played variable, only while keeping pressing the key.
If the function key corresponding to "MOVE" is detached, the robot will stop. And, if the enabling
switch (3 position switch) is detached or it presses down still more strongly, servo-off will be carried
out and the robot will stop.
The robot moves by this operation.
When the robot moves, confirm not interfering with peripheral equipment etc.
beforehand.
We recommend you to lower speed at first. And, also important to predicting the
trajectory of the robot by moving mode (the joint, the XYZ) of operation.
Name Movement method
Joint mode
The robot moves with joint interpolation to the designated position data place.
This moving method is used when the jog mode is JOINT jog.
The axes are adjusted in the same way as with the Mov instruction.
XYZ mode
The robot moves with linear interpolation to the designated position data place. Thus, the robot will
not move if the structure flag for the current position and designated position differ.
This moving method is used when the jog mode is XYZ, 3-axis XYZ, CYLNDER or TOOL jog.
The axes are adjusted in the same way as with the Mvs instruction.
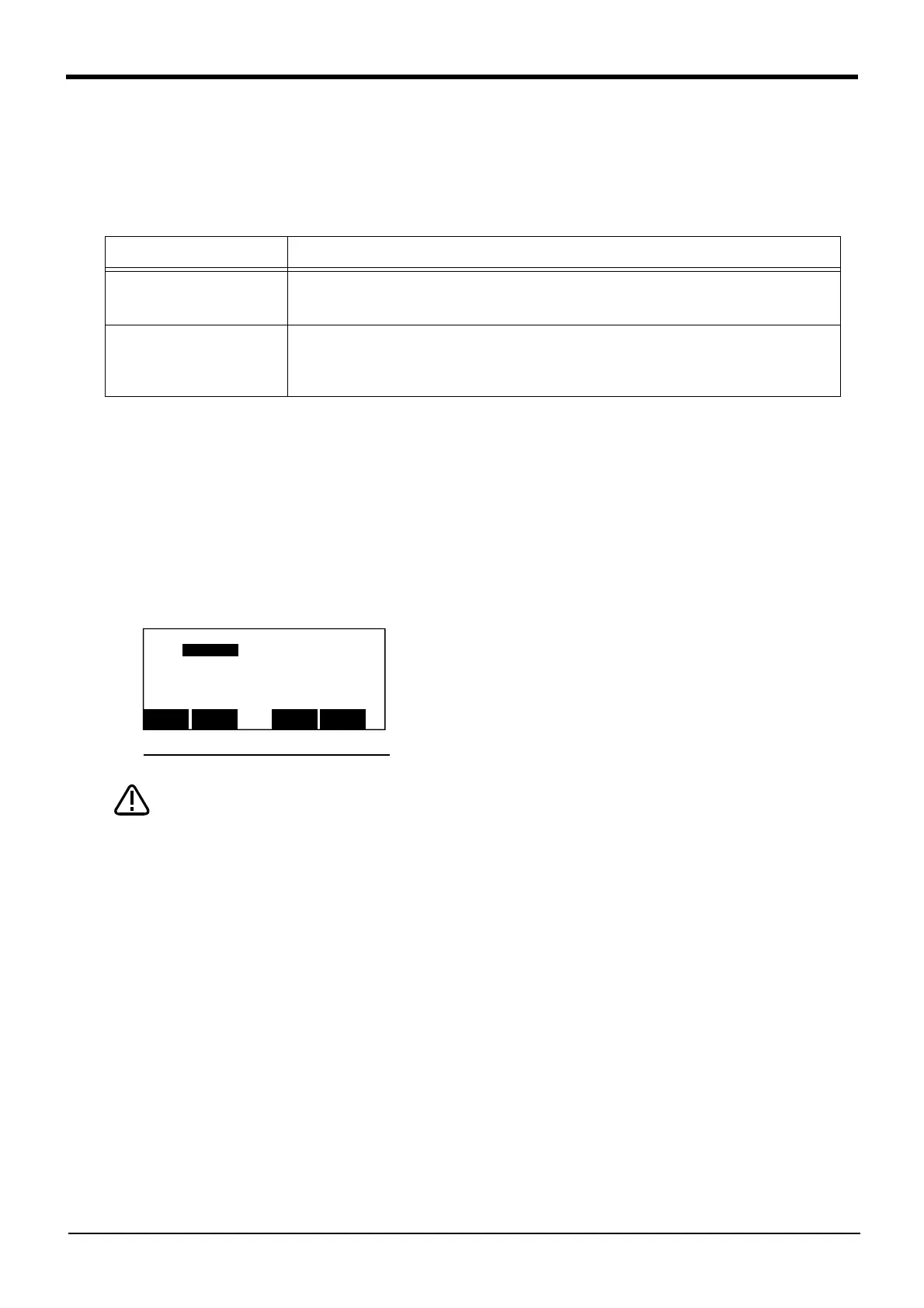
<POS.> JNT 50% P5
X:+977.45 A:-180.00
Y: +0.00 B: +89.85
Z:+928.24 C:+180.00
L1: L2:
FL1: 7 FL2: 0
Prev
123
TEACH
MOVE
⇒
Next
Display the position edit screen [F1]
 Loading...
Loading...



