4-98 MELFA-BASIC V functions
4MELFA-BASIC V
4.1.1 Robot operation control
(1) Joint interpolation movement
The robot moves with joint axis unit interpolation to the designated position. (The robot interpolates with a
joint axis unit, so the end path is irrelevant.)
*Command word
*Statement example
*Program example
Program example
Command word Explanation
Mov The robot moves to the designated position with joint interpolation. It is possible to specify the
interpolation form using the TYPE instruction. An appended statement Wth or WthIf can be
designated
Statement example Explanation
Mov P1 .......................................................
' Moves to P1.
Mov P1+P2.................................................
' Moves to the position obtained by adding the P1 and P2 coordinate elements. Refer to Page 122.
Mov P1*P2..................................................
' Moves to the position relatively converted from P1 to P2. Refer to Page 122.
Mov P1,-50 *1)............................................
' Moves from P1 to a position retracted 50mm in the hand direction.
Mov P1 Wth M_Out(17)=1.........................
' Starts movement toward P1, and simultaneously turns output signal bit 17 ON.
Mov P1 WthIf M_In(20)=1, Skip.................
' If the input signal bit 20 turns ON during movement to P1, the movement to P1 is stopped, and the
program proceeds to the next stop.
Mov P1 Type 1, 0 ........................................
(Default value: Long way around)
' Specify either roundabout (or shortcut) when the operation angle of each axis exceeds 180 deg..
Program Explanation
1Mov P1
’(1)
Moves to P1.
2
Mov P2, -50
*1) ’(2)
Moves from P2 to a position retracted 50mm in the hand direction.
3Mov P2
’(3)
Moves to P2
4 Mov P3, -100 Wth M_Out (17) = 1
’(4)
Starts movement from P3 to a position retracted 100mm in the hand direction, and turns ON output
signal bit 17.
5Mov P3
’(5)
Moves to P3
6
Mov P3, -100
*1) ’(6)
Returns from P3 to a position retracted 100mm in the hand direction.
7End
’
Ends the program.
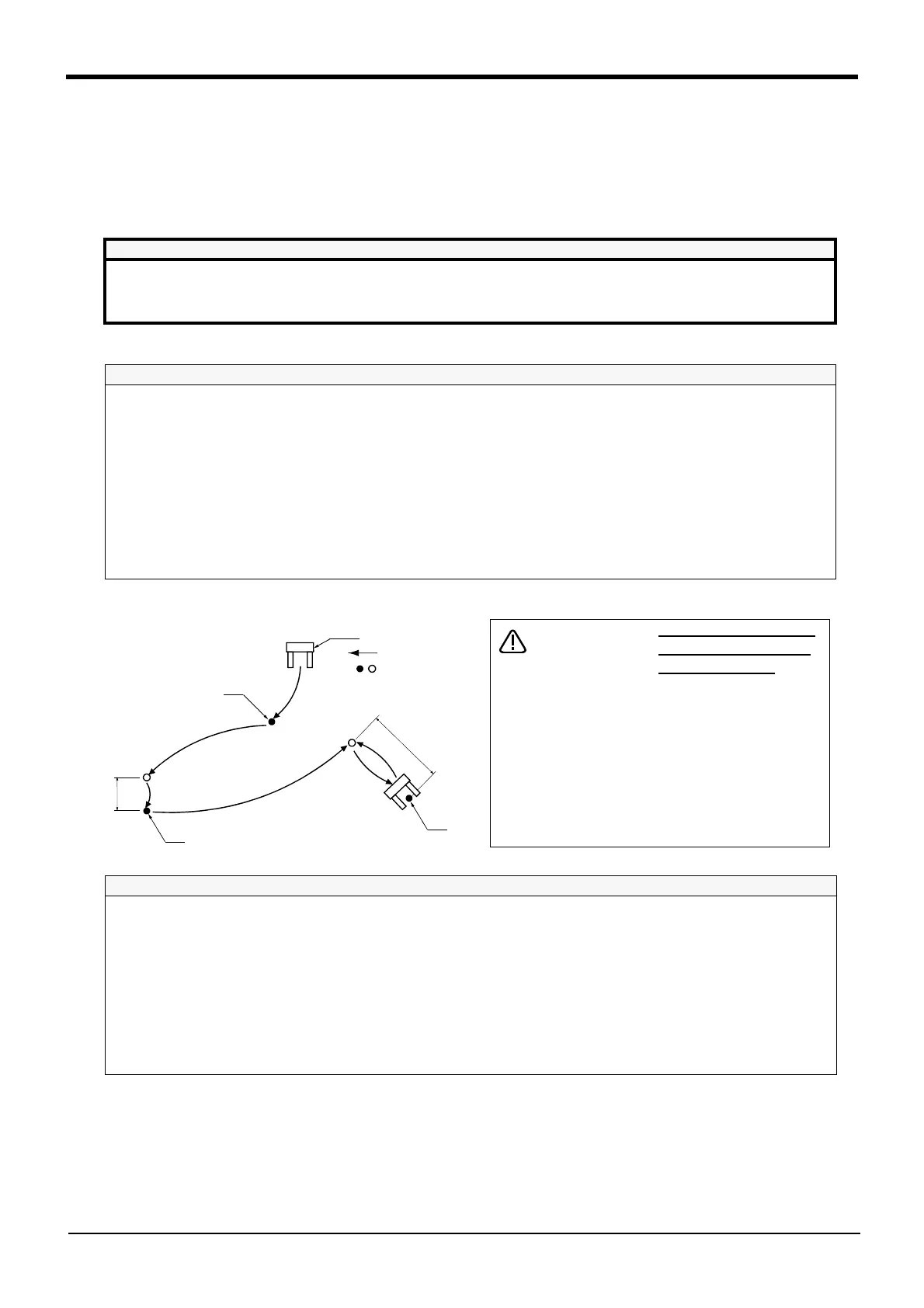
(1)
(2)
P1
(3)
(4) Turn output
signal bit 17 ON.
(5)
(6)
5
0
m
m
1
0
0
m
m
P2
P3
Hand
:Movement position
:Robot movement
*1) Specification of for-
ward/backward move-
ment of the hand
The statement examples and program exam-
ples are for a vertical 6-axis robot.The hand
advance/retrace direction relies on the Z axis
direction (+/- direction) of the tool coordinate
set for each model.
Refer to the tool coordinate system shown in
"Confirmation of movement" in the separate
"From Robot unit setup to maintenance", and
designate the correct direction.
 Loading...
Loading...



