5Functions set with parameters
About the collision detection function 5-515
(2) Related parameters
The following parameters are related to the collision detection function. Refer to Page 438, "5.1 Movement
parameter" and Page 496, "5.16 Hand and Workpiece Conditions (optimum acceleration/deceleration set-
tings)" for the detailed explanation of these parameters.
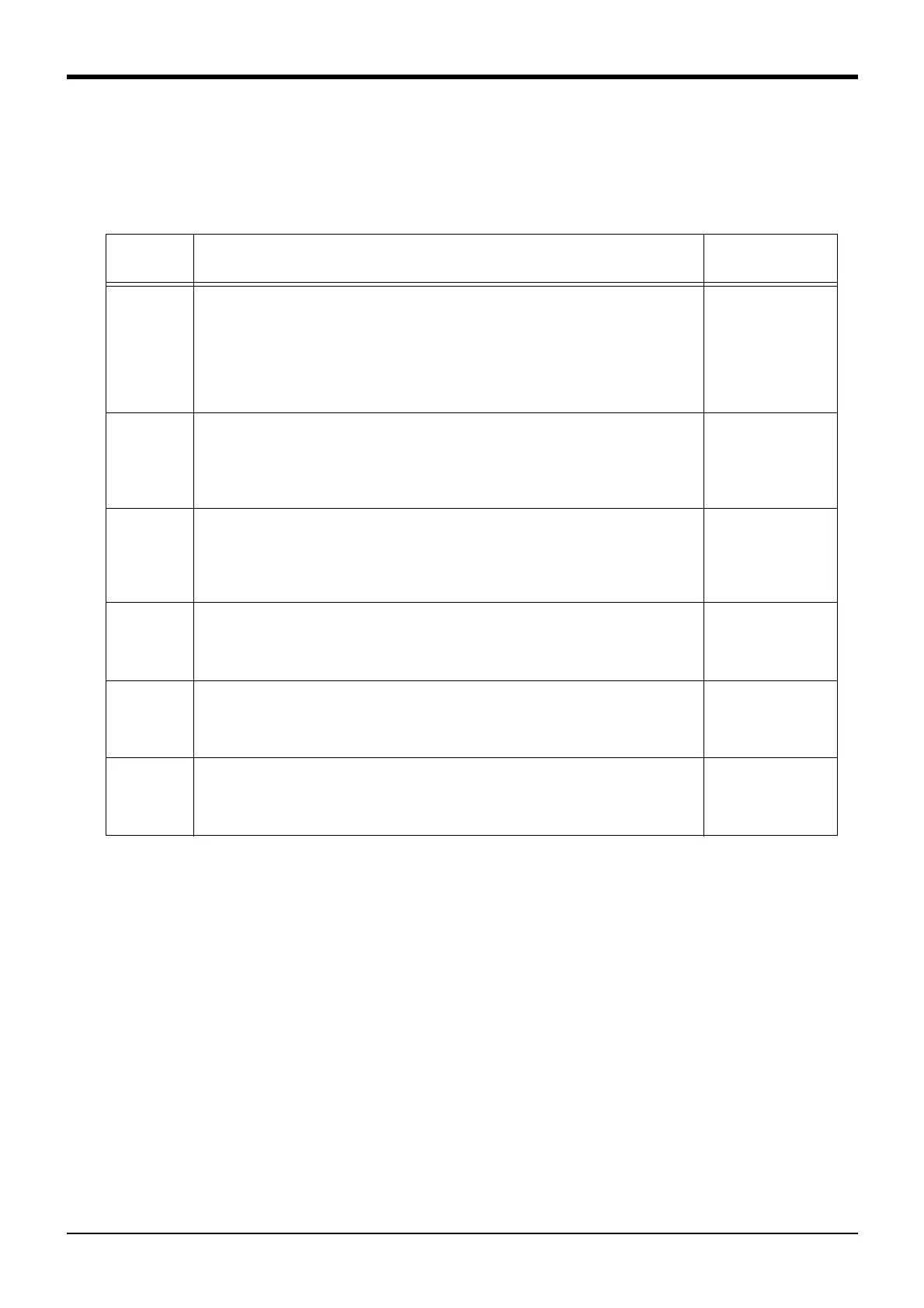
Table 5-20:Parameters related to the collision detection function
Parameter
name
Description and value
Setting value at
shipment
COL Define whether to enable or disable the collision detection function as well as
whether it is valid or invalid immediately after turning the power supply on.
Element 1: Specify whether to enable (1) or disable (0) the collision detection
function
Element 2: Specify the initial state in program operation. Enable (1)/disable (0)
Element 3: Specify whether the function is enabled or disabled at jog operation.
Enabled (1)/disabled (0)/NOERR mode (2)
RH-3FH/6FH/
12FH/20FH series:
1,0,1
RV-F series:
0,0,1
RH-3FHR series:
1,1,1
COLLVL Set the initial value of the detection level (sensitivity) of each joint axis at program
operation. This value is a scaling factor that amplifies the detection level standard
value prescribed in the collision detection function. The smaller the value, the
higher the detection level.
Setting range: 1 to 500, unit: %
The setting varies
depending on the
model.
COLLVLJG Set the detection level (sensitivity) of each joint axis at jog operation (including
pause status). This value is a scaling factor that amplifies the detection level
standard value prescribed in the collision detection function. The smaller the
value, the higher the detection level.
Setting range: 1 to 500, unit: %
The setting varies
depending on the
model.
HNDDAT*
* is 1 to 8
Set the hand conditions (via tool coordinates).
HNDDAT0 is employed as the initial condition immediately after turning the power
supply on. (Weight, size X, size Y, size Z, center of gravity X, center of gravity Y,
center of gravity Z) Unit: kg, mm
The setting varies
depending on the
model.
WRKDAT*
* is 1 to 8
Set the workpiece conditions (via tool coordinates).
WRKDAT0 is employed as the initial condition immediately after turning the
power supply on. (Weight, size X, size Y, size Z, center of gravity X, center of
gravity Y, center of gravity Z) Unit: kg, mm
0.0, 0.0, 0.0, 0.0,
0.0, 0.0, 0.0
HNDHOLD*
* is 1 to 8
Specify whether to grab (1) or not grab (0) workpieces when the HOpen and
HClose instructions are executed.
Element 1: Specify the status when the HOpen instruction is executed.
Element 2: Specify the status when the HClose instruction is executed.
0,1
 Loading...
Loading...



