5Functions set with parameters
Direct communication with robot CPUs 6-549
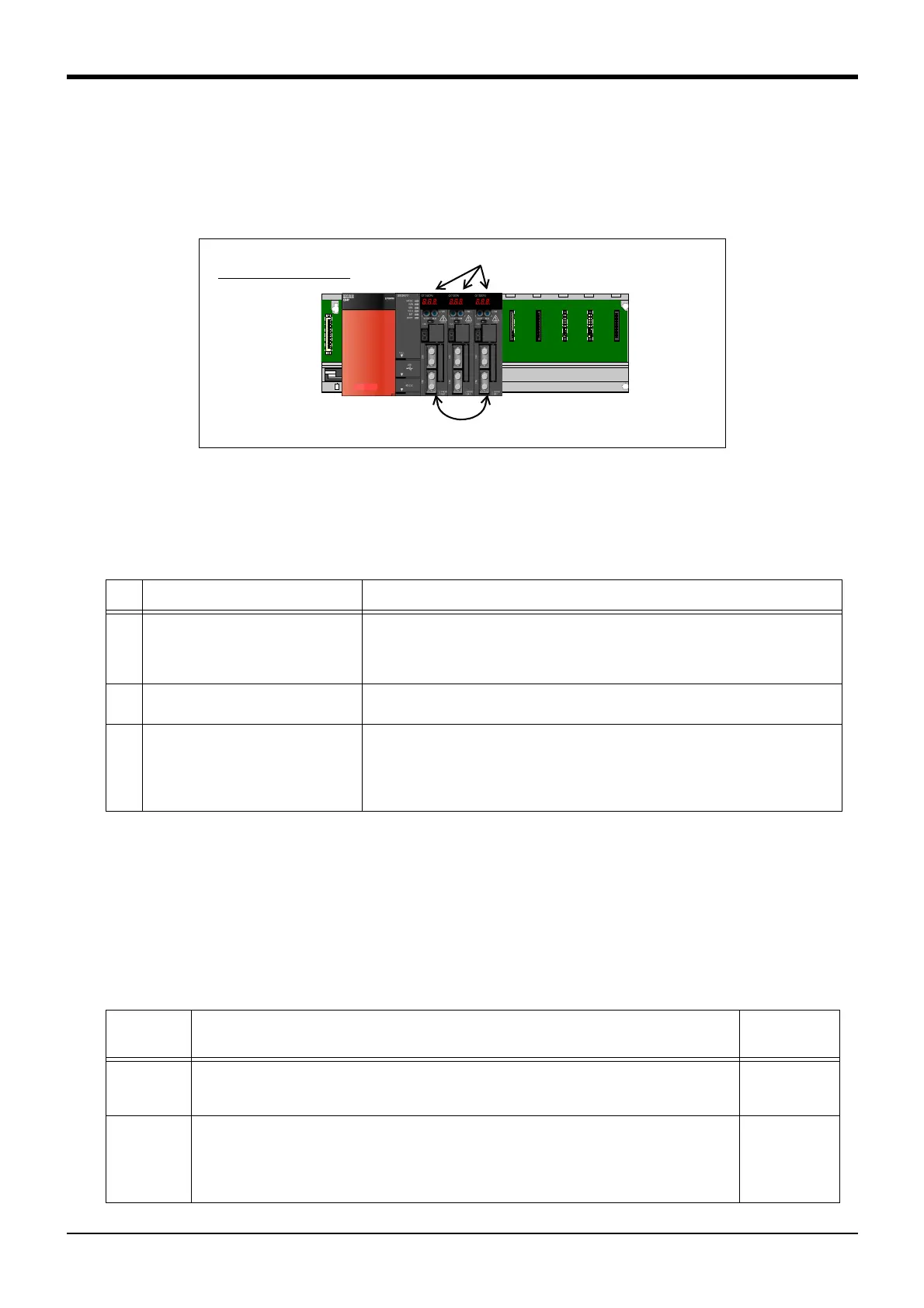
5.26 Direct communication with robot CPUs
This function is to exchange the signals directly with two or more robot CPUs in the robot controller of
CR7xx-Q series.
Since the rudder program of the sequencer is not needed, the exchange of the signal can be executed more
speedily. And, the reference of shared memory information other than robot CPUs, such as motion CPU, is
also possible.
Fig.5-29:Direct communication with robot CPUs
(1) Specification
This function is available at the software version or later shown in Table 5-47. The setup of the parameter is
unnecessary.
Specification is shown in Table 5-47.
Table 5-47:Specification
(2) The usage
Read/Write of the multi-CPU share device are possible by using the "M_UDevW: Writing/Reference per
word unit (the 16 bits)" and "M_UDevD: Writing/Reference per double word unit (the 16 bits)" of the Robot
Status Variable of program.
(3) Description of the status variable
Explains the outline of the Robot Status Variable to Table 5-48. Refer to each description page of Page 311,
"4.14.2 Explanation of Each Robot Status Variable" for details.
Table 5-48:Related Robot Status Variable
No Item Specification
1 Available software version This function can be used with in the following software version.
Controller: R2b
Note) There exists no limitation of the software version of R32TB/R33TB, R56TB/
R57TB, and RT ToolBox2.
2 Available device range Range which can be specified by the multi-CPU shared device. (U3En\G10000 to
G24335)
3 Assignment of the dedicated input
output signal
The control of the robot by dedicated signal is executed by the sequencer (No. 1).
The dedicated input output signal is not assigned to the shared memory device No.2
or later.
Assign the dedicated input output signal to the shared memory of the sequencer No.1
always.
Variable
name
Details
Reference
page
M_UDevW Read/Write the multi-CPU shared device per word. (U3En\G□)
ex.) M_UDevW(&H3E1, 10010)=&HFFFF ' Write the &HFFFF (hexadecimal number) to the
shared memory address 10010 of No. 2 CPU.
Page 370
M_XDevD Read/Write the multi-CPU shared device per double word. (U3En\G□)
ex.) 1 M_UDevD(&H3E1, 10011)=P1.X * 1000 ' Write the multiplication result value of X coordi-
nate value of the position variable P1 by 1000 to
shared memory address 10011/10012 (two
words) of No. 2 CPU.
Page 370
Robot CPU system
Robot CPU unit
Direct communication with robot CPUs
 Loading...
Loading...



