5Functions set with parameters
Standard Tool Coordinates 5-471
5.6 Standard Tool Coordinates
Tools data must be set if the robot's control point is to be set at the hand tip when the hand is installed on the
robot. The setting can be done in the following three manners.
1) Set in the MEXTL parameter.
2) Set in the robot program using the Tool instruction.
3) Set a tool number in the M_Tool variable.The values set by the MEXTL1 to 16 parameters are used as
tool data.
Refer to Page 367, " M_Tool".
The default value at the factory default setting is set to zero, where the control point is set to the mechanical
interface (flange plane).
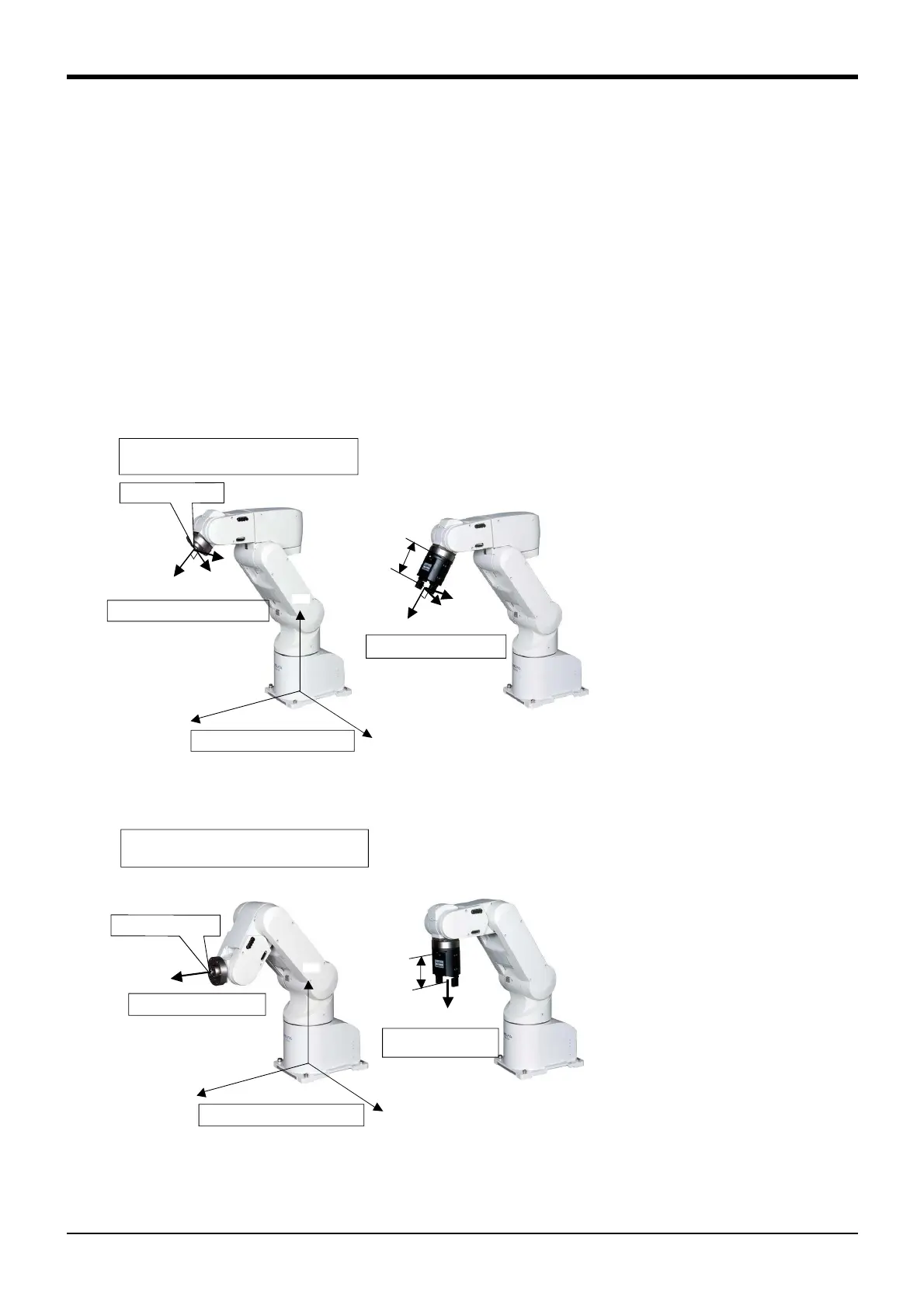
Structure of tools data: X, Y, Z, A, B, C
X, Y and Z axis:Shift from the mechanical interface in the tool coordinate system
A axis: X-axis rotation in the tool coordinate system
B axis: Y-axis rotation in the tool coordinate system
C axis: Z-axis rotation in the tool coordinate system
<A case for a vertical 6-axis
robot>
1) Sample parameter setting
Parameter name: MEXTL
Value: 0, 0, 95, 0, 0, 0
2) Sample Tool instruction setting
1 Tool (0,0,95,0,0,0)
A 6-axis robot can take various
postures within the movement
range.
<A case for a vertical 5-axis
robot>
1) Sample parameter setting
Parameter name: MEXTL
Value: 0, 0, 95, 0, 0, 0
2) Sample Tool instruction setting
1 Tool (0,0,95,0,0,0)
Only the Z-axis component is
valid for a 5-axis robot for move-
ment range reasons. Data input to
other axes will be ignored.
Zt
Yt
Xt
Mechanical interface
Default tool coordinate system:Xt,Yt,Zt
Zr
Yr
Xr
Robot coordinate system:Xr,Yr,Zr
Tool coordinate
system after the change:Xt,Yt,Zt
Example) 95mm
Zt
Yt
Xt
A case for a vertical 6-axis robot
World coordinate system: Xw, Yw, Zw
Xw
Yw
Zw
Zt
Default tool coordinate system
:Zt
Zr
Yr
Xr
Zt
A case for a vertical 5-axis robot
Mechanical interface
Tool coordinate
system after the change:Zt
Robot coordinate system:Xr,Yr,Zr
Example) 95mm
World coordinate system: Xw, Yw, Zw
Xw
Yw
Zw
 Loading...
Loading...



