4MELFA-BASIC V
MELFA-BASIC V functions 4-99
*Related functions
(2) Linear interpolation movement
The end of the hand is moved with linear interpolation to the designated position.
*Command word
*Statement example
*Program example
Function Explanation page
Designate the movement speed........................................................ Page 103, "(5) Acceleration/deceleration time and speed con-
trol"
Designate the acceleration/deceleration time. ................................. Page 103, "(5) Acceleration/deceleration time and speed con-
trol"
Confirm that the target position is reached. ...................................... Page 105, "(6) Confirming that the target position is reached"
Continuously move to next position without stopping at target posi-
tion..................................................................................................... Page 102, "(4) Continuous movement"
Move linearly. ................................................................................... Page 99, "(2) Linear interpolation movement"
Move while drawing a circle or arc. ................................................... Page 100, "(3) Circular interpolation movement"
Add a movement command to the process....................................... Page 302, " Wth (With)"
Command word
Explanation
Mvs The robot moves to the designated position with linear interpolation. It is possible to specify the
interpolation form using the TYPE instruction. An appended statement Wth or WthIf can be
designated.
Statement example
Explanation
Mvs P1 ................................................................
' Moves to P1
Mvs P1+P2..........................................................
' Moves to the position obtained by adding the P1 and P2 coordinate elements. Refer to Page
122.
Mvs P1*P2...........................................................
' Moves to the position relatively converted from P1 to P2.
Mvs P1, -50 *1)....................................................
' Moves from P1 to a position retracted 50mm in the hand direction.
Mvs ,-50 *1) .........................................................
' Moves from the current position to a position retracted 50mm in the hand direction.
Mvs P1 Wth M_Out(17)=1...................................
' Starts movement toward P1, and simultaneously turns output signal bit 17 ON.
Mvs P1 WthIf M_In(20)=1, Skip..........................
' If the input signal bit 20 turns ON during movement to P1, the movement to P1 is stopped, and
the program proceeds to the next stop.
Mvs P1 Type 0, 0.................................................
' Moves to P1 with equivalent rotation
Mvs P1 Type 9, 1.................................................
' Moves to P1 with 3-axis orthogonal interpolation.
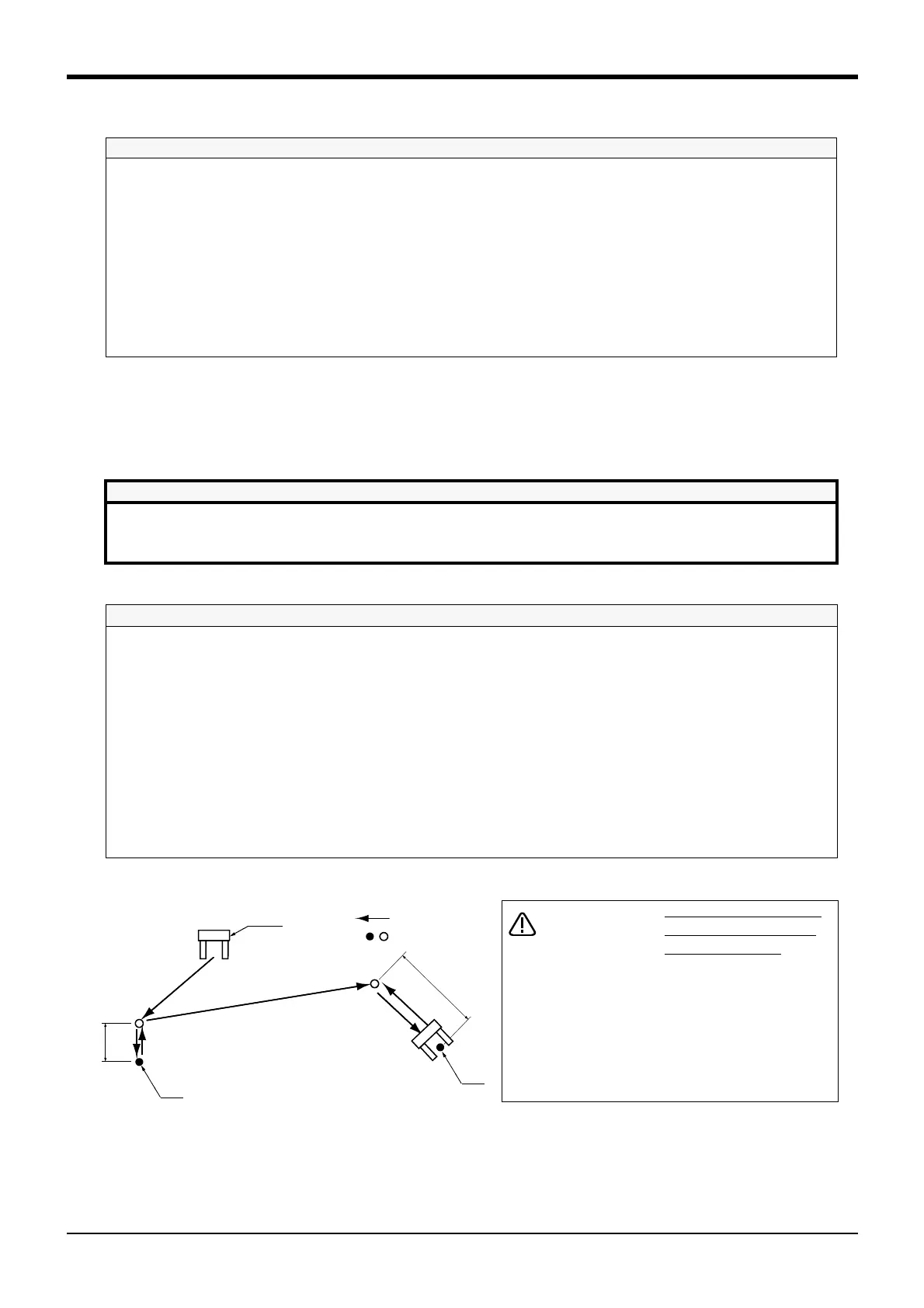
(1)
(2)
(3)
(4)Turn output
signal bit 17 ON.
(5)
(6)
5
0
m
m
100m
m
P1
P2
Hand
:Movement position
:Robot movement
*1) Specification of for-
ward/backward move-
ment of the hand
The statement examples and program exam-
ples are for a vertical 6-axis robot.The hand
advance/retrace direction relies on the Z axis
direction (+/- direction) of the tool coordinate
set for each model.
Refer to the tool coordinate system shown in
"Confirmation of movement" in the separate
"From Robot unit setup to maintenance", and
designate the correct direction.
 Loading...
Loading...



