4MELFA-BASIC V
MELFA-BASIC V functions 4-103
(5) Acceleration/deceleration time and speed control
The percentage of the acceleration/deceleration in respect to the maximum acceleration/deceleration, and
the movement speed can be designated.
*Command word
*Statement example
*Movement speed during joint interpolation
Controller (T/B) setting value x Ovrd command setting value x JOvrd command setting value.
*Movement speed during linear and circular interpolation
Controller (T/B) setting value x Ovrd command setting value x Spd command setting value.
*Program example
Command word
Explanation
Accel
Designates the acceleration during movement and the deceleration as a percentage (%) in
respect to the maximum acceleration/deceleration speed.
Ovrd
Designates the movement speed applied on the entire program as a percentage (%) in respect
to the maximum speed.
JOvrd
Designates the joint interpolation speed as a percentage (%) in respect to the maximum speed.
Spd
Designate the linear and circular interpolation speed with the hand end speed (mm/s).
Oadl This instruction specifies whether the optimum acceleration/deceleration function should be
enabled or disabled.
Statement example
Explanation
Accel.................................................................................
Sets both the acceleration and deceleration to 100%.
Accel 60, 80......................................................................
Sets the acceleration to 60% and the deceleration to 80%.
(For maximum acceleration/deceleration is 0.2 sec.
acceleration 0.2/0.6=0.33 sec. deceleration 0.2/0.8=0.25 sec. )
Ovrd 50.............................................................................
Sets the joint interpolation, linear interpolation and circular interpolation to 50% of the
maximum speed.
JOvrd 70...........................................................................
Set the joint interpolation operation to 70% of the maximum speed.
Spd 30 ..............................................................................
Sets the linear interpolation and circular interpolation speed to 30mm/s.
Oadl ON ...........................................................................
This instruction enables the optimum acceleration/deceleration function.
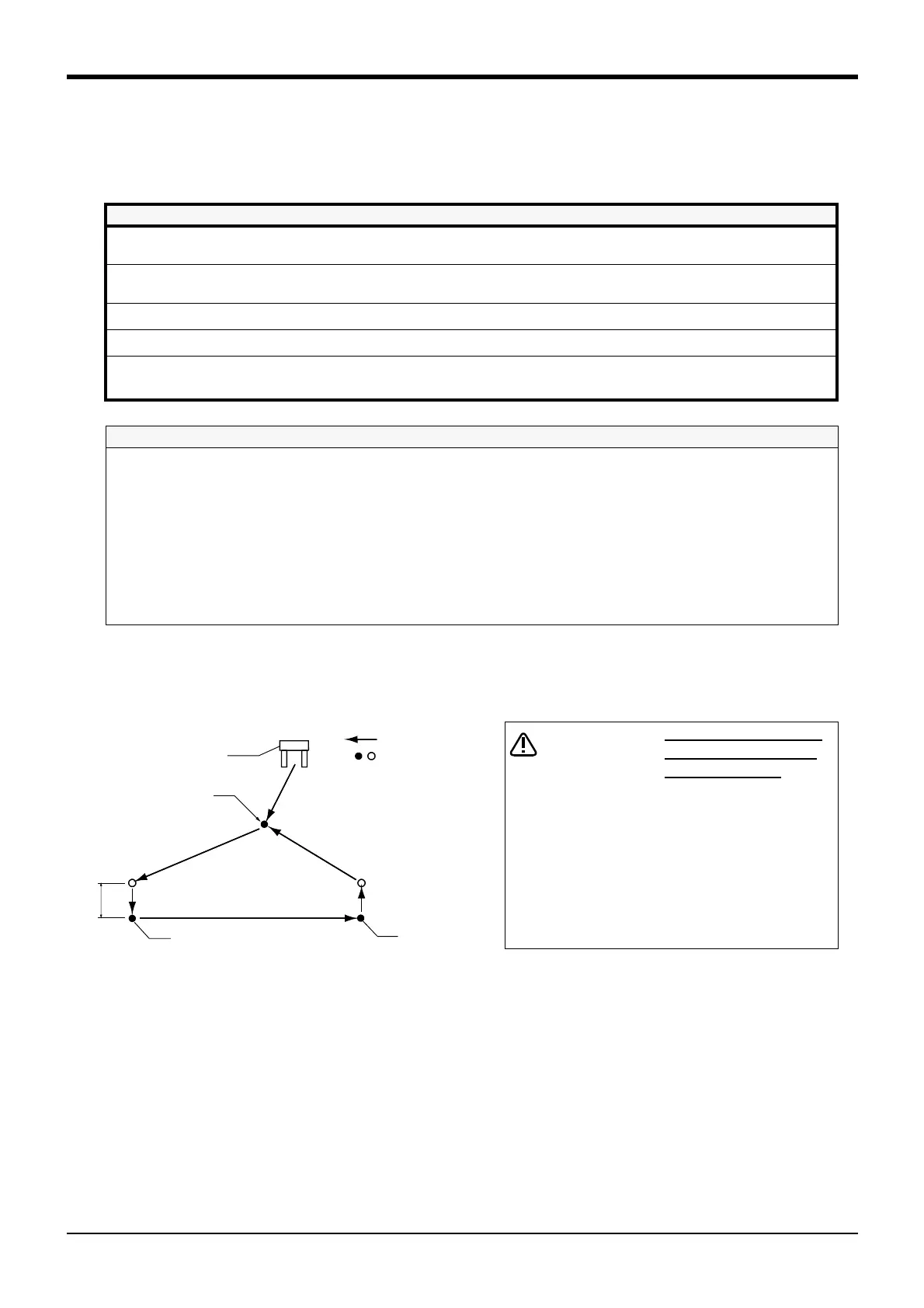
(1)....Maximum speed
(2)..........Maximum speed
P1
(3)....50%
(4)120mm/s
(5)Maximum speed
(6)70%
5
0
m
m
P2
P3
Hand
:Movement position
:Robot movement
*1) Specification of for-
ward/backward move-
ment of the hand
The statement examples and program exam-
ples are for a vertical 6-axis robot.The hand
advance/retrace direction relies on the Z axis
direction (+/- direction) of the tool coordinate
set for each model.
Refer to the tool coordinate system shown in
"Confirmation of movement" in the separate
"From Robot unit setup to maintenance", and
designate the correct direction.
 Loading...
Loading...



