Appendix-614 Spline interpolation
7Appendix
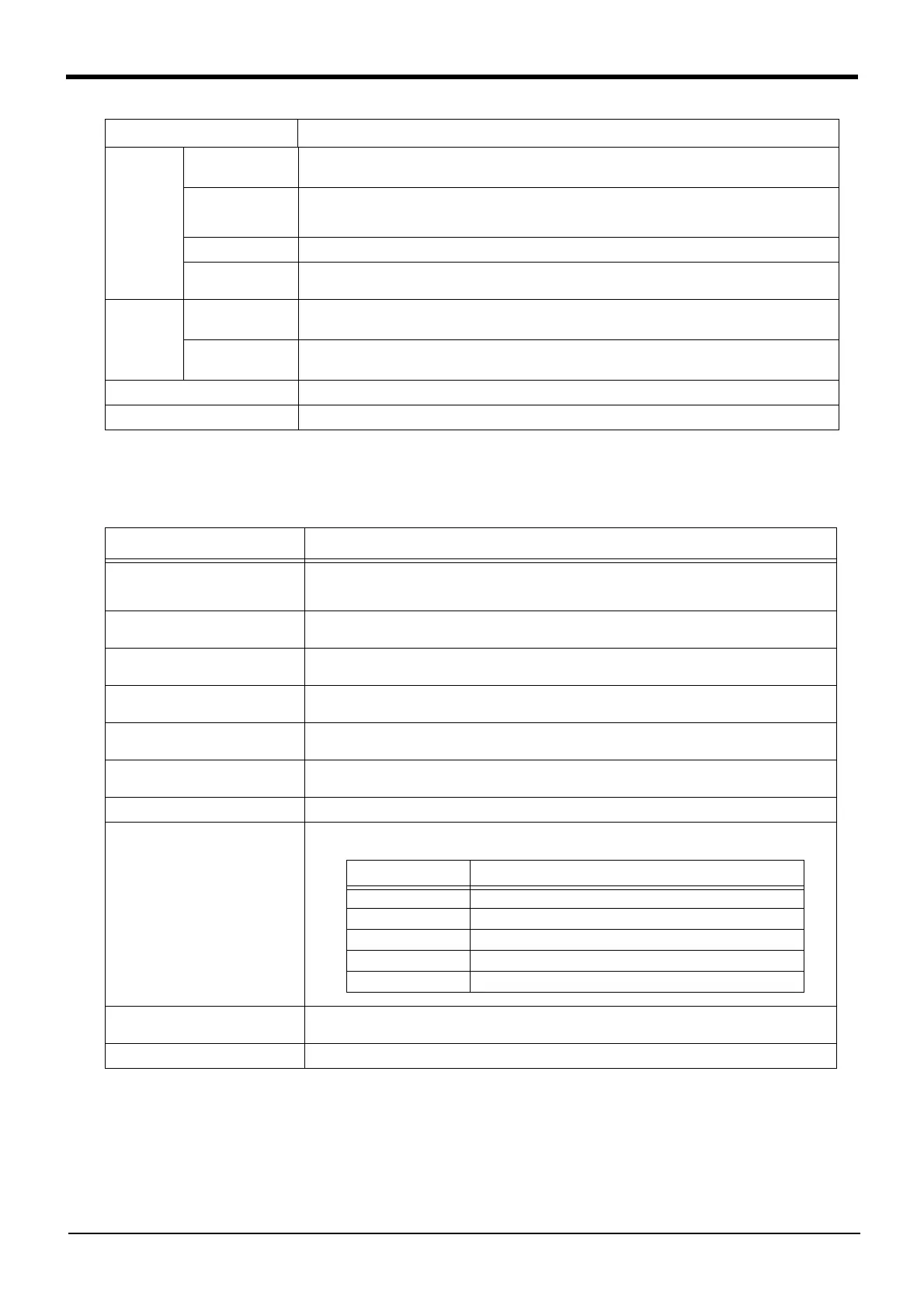
(2) Restrictions
Table 7-4:Restrictions
Path
adjustment
Tolerance desig-
nation
The degree of curve swelling can be designated in block units. Random blocks can be changed
from spline curves to linear paths.
Arc designation Three consecutive points are designated as the path point to create an arc path instead of a
spline curve.
* Arc designation method is different depending on the version of the spline file.
Spline cancel The spline curve is split at a path point where change in moving direction is large.
Block length ratio If the segment length is larger than the specified ratio compared to the previous and next blocks,
that block is automatically handled as a linear block.
Operation
mode
Constant linear
speed
The interpolation command is generated so the robot moves uniformly at the designated speed.
Variable linear
speed
If the speed may be exceeded during movement because the designated speed is large or the
change in posture is large, etc., the speed is automatically lowered.
Signal output A general-purpose signal can be output when passing through the path points.
Numerical setting A random value can be set for each path point, and that value referred to with the status variable.
Item
Details of restrictions
Additional axis Spline interpolation does not support additional axes. Even if coordinate values for the addi-
tional axis are set at each path point, the robot will not start from the start position coordinate
values during spline interpolation.
Cnt command Even if the interpolation continuous movement is designated with the Cnt command, this does
not function for the spline interpolation start position and end position.
Oadl command Even if optimum acceleration/deceleration control is enabled with the Oadl command, it does
not function for spline interpolation.
MvTune command Operation mode designation with the MvTune command does not function for spline interpola-
tion.
FsGChg command Spline interpolation does not support the <Changeover start position> target designated with
the FsGChg command (designates control characteristics changeover for force sensor control).
Tool/base changeover The data cannot be switched between tool data and base data while spline interpolation execu-
tion is halted.
Jrc command The Jrc command cannot be executed while the spline interpolation execution is halted.
Interpolation movement related
status variables
The following status variables related to interpolation movement will not return the spline inter-
polation status.
Interrupt process Even if "Stop type 1" is designated as the interrupt stop type, the same stopping as "Stop type
2" will take when interrupting during spline interpolation movement.
Tracking function The tracking function and spline interpolation cannot be used simultaneously.
Item Specifications
Status variable Function
M_Acl Returns the current acceleration time ratio.
M_DAcl Returns the current deceleration time ratio.
M_Ratio Returns the attainment ratio to the target position.
M_RDst Returns the remaining distance to the target position.
M_Spd Returns the currently set speed.
 Loading...
Loading...



