hand. This makes it easier to adjust the posture of the robot hand toward the work concerned or the
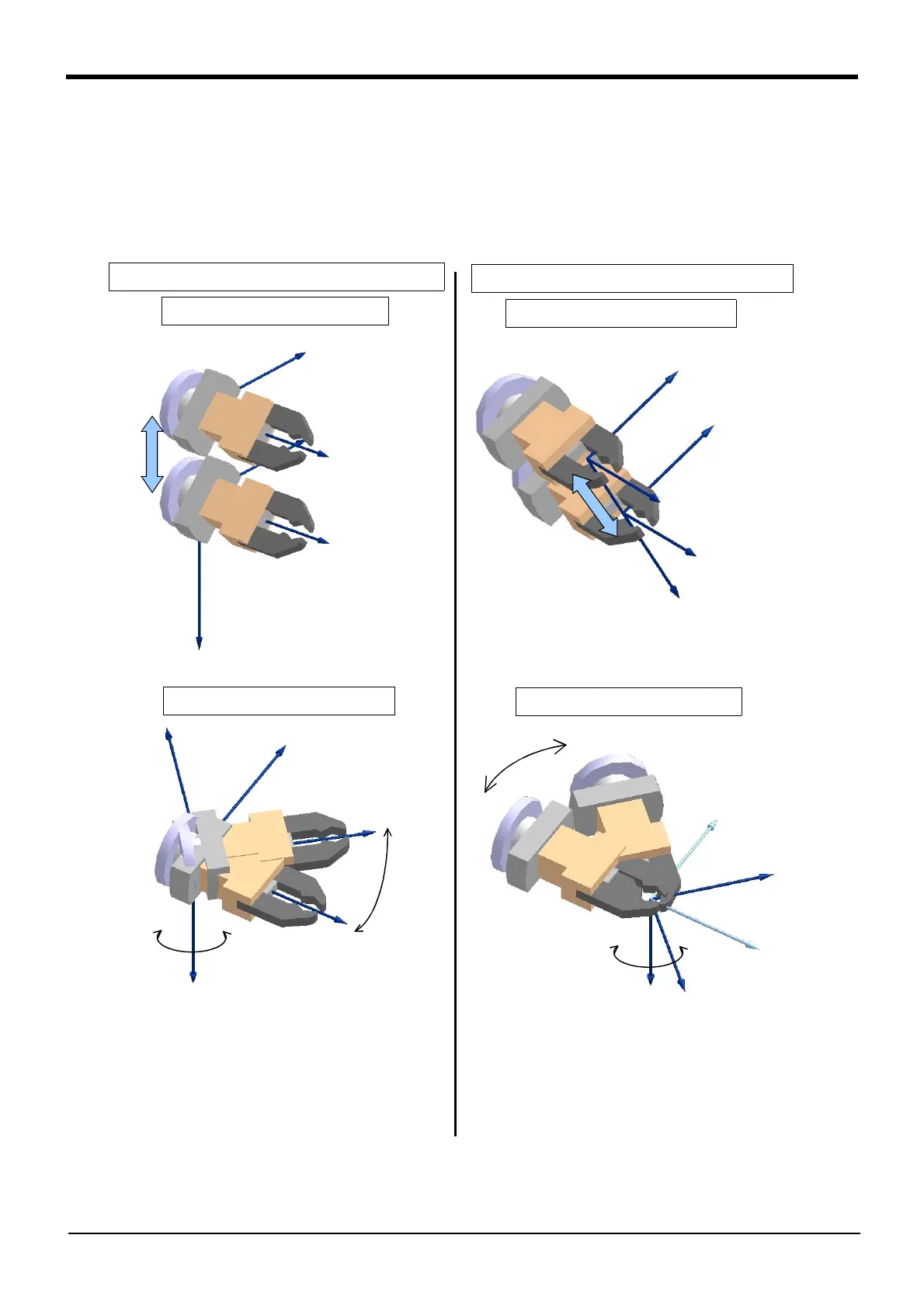
In the case of tool data setting being not made
In the case of tool data setting being made
Travel in the direction of X axis
Travel in the direction of X axis
Travel in the direction of A axis
Travel in the direction of A axis
The robot hand rotates on the
Xm axis of the mechanical
interface coordinate system,
thus having a wide range of
motion at its leading end.
The robot hand rotates on the
Xt axis of the tool coordinate
system. Rotational motion on
the leading end of the robot
hand permits a change of pos-
ture without the need to dis-
place the work from its original
position.
Motion along the Xm axis of
the mechanical interface coor-
dinate system
Motion along the Xt axis of
the tool coordinate system.
Motion parallel/perpendicu-
lar to the face of the robot
hand assures a register
with the orientation of the
work.
 Loading...
Loading...



