5-482 Automatic return setting after jog feed at pause
5Functions set with parameters
5.10 Automatic return setting after jog feed at pause
This specifies the path behavior that takes place when the robot is paused during automatic operation or
during step feed operation, moved to a different position using a jog feed with T/B, and the automatic opera-
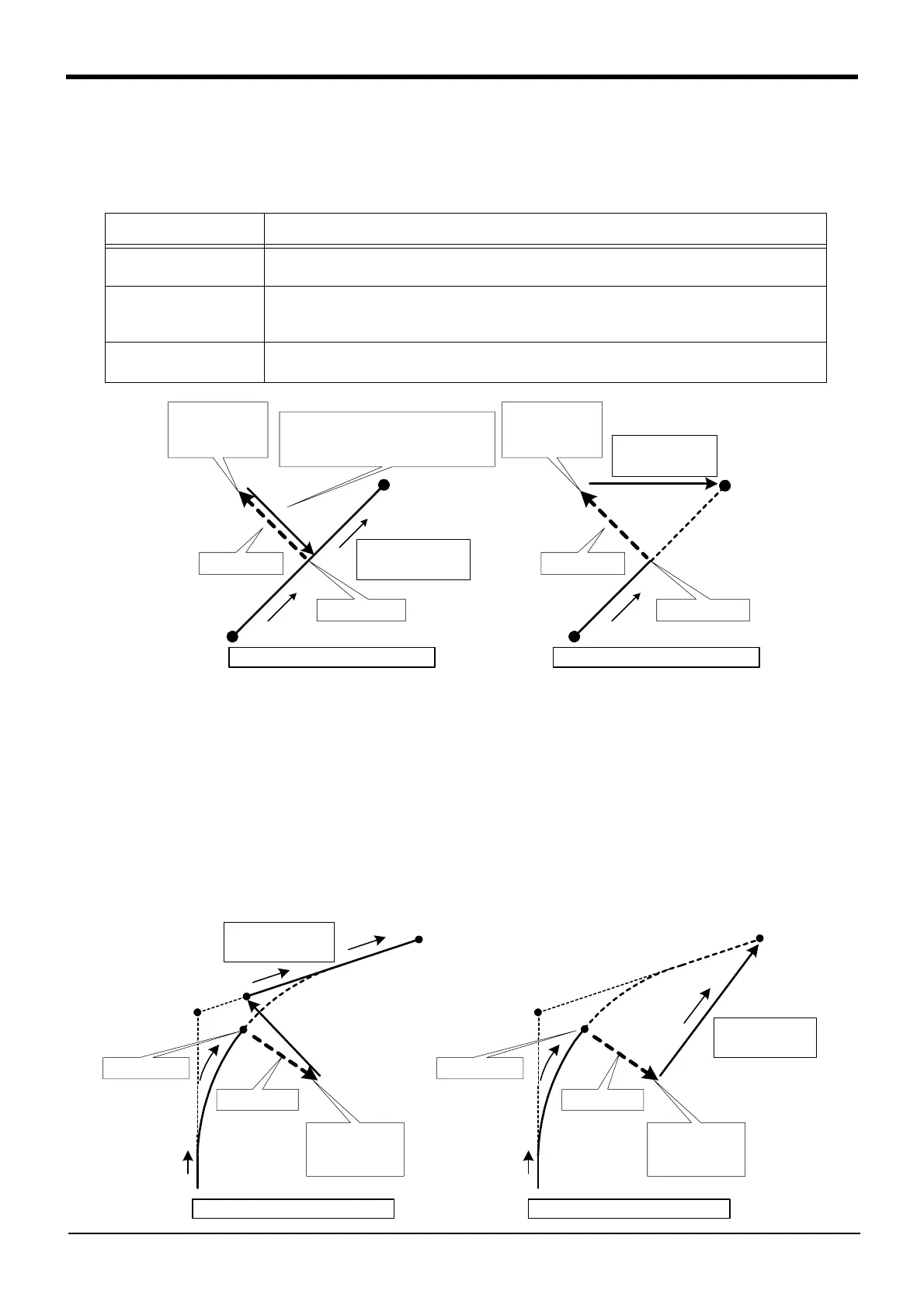
tion is resumed or the step feed operation is executed again. See the following diagram.
[Caution] If movement other than a joint jog (XYZ, tools, cylindrical, etc.) has been used when the "RET-
PATH" parameter is set to 1, joint interpolation will be used to return to the original position at the
time pause took place. Therefore, be careful not to interfere with peripheral devices.
[Caution] If the parameter "RETPATH" is set to 2 for a robot whose structure data is valid or with multiple
rotations, and the robot is moved from a suspended position by joint jog, the robot is moved to a
position different from the original structure data and/or multiple-rotation data and may become
unable to return to the suspended position. In this case, adjust the position of the robot to the sus-
pended position and resume moving the robot.
If "RETPATH=1 or 2" is set as shown in the figure below, and the robot is operated continuously (continuous
path operation) using the Cnt instruction, the robot returns to a position on the travel path from P1 to P2
instead of the suspended position. When "RETPATH=0" is set, the robot moves to the target position from
the current position.
Parameter and value Description of the operation
RETPATH=1 (Default) 1) Returns to the original position where the pause took place using joint interpolation.
2) Resumes from the line that was paused.
RETPATH=0 Resumes from the line that was paused from the position resulting after the jog operation. Therefore,
movement will take place using the interpolation method of the instruction under execution from the
current position to the next target position.
RETPATH=2
1) Return by XYZ interpolation to the interrupted position.
2) Resume the interrupted line.
RETPATH=1 or 2 RETPATH=0
Move to target
position
Jog feed
Interrupt here
Resume the
automatic
execution
Return to interrupted position
RETPATH=1:JOINT interpolation
RETPATH=2:XYZ interpolation
Jog feed
Interrupt here
Move to target
position
Resume the
automatic
execution
P1
P2
P1
P2
RETPATH=1 or 2 RETPATH=0
Move to target
position
Jog feed
Interrupt here
Resume the
automatic
execution
Jog feed
Move to target
position
Resume the
automatic
execution
Interrupt here
 Loading...
Loading...



