7Appendix
Spline interpolation Appendix-635
(3) Creating new spline files with robot language
■Creating new spline files with SplWrt command
Spline files can be created using the SplWrt (spline write) command at robot controllers with software ver-
sion R6b, S6b, or later. Refer to SplWrt (Spline Write) for command details.
Data shown in Table 7-15 is described sequentially separated by commas as path point data in read files.
An example can be seen in Fig. 7-75.
Always indicate "Data identification tags" sequentially from <x> in the first line. If there are no "Data identifi-
cation tags", or if there is an insufficient number of data items (20) in each row, an error will occur.
■Editing existing spline files with SplFWrt command
Frame conversion coordinate data can be registered to spline files saved using the SplFWrt (spline frame
write) command at robot controllers with software version R6b, S6b, or later. Refer to SplFWrt (Spline Frame
Write) for command details.
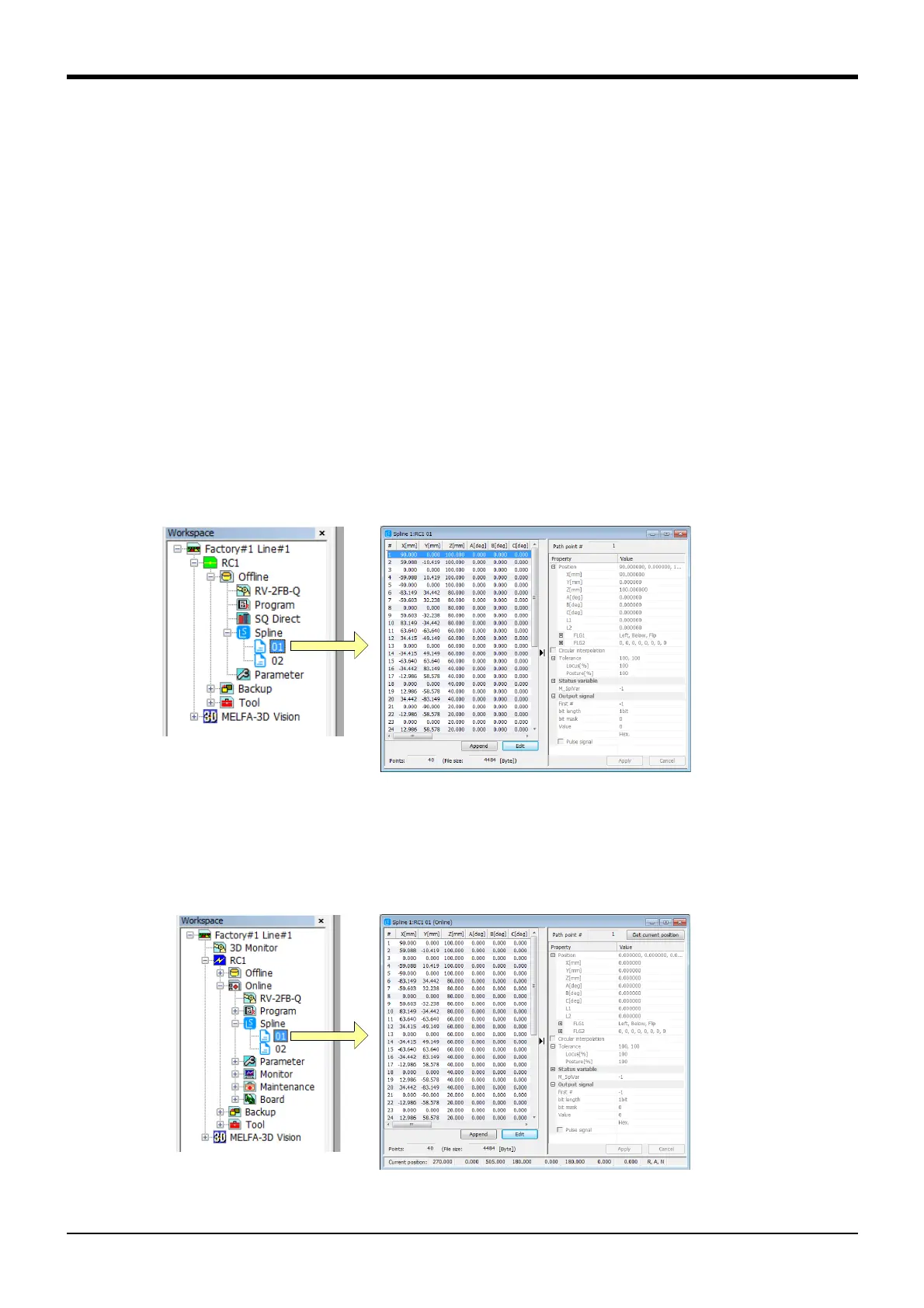
(4) Opening an existing spline file
■Opening a spline file saved in the personal computer
Select [Offline] → [Spline] for the target project and expand it. The saved spline files will appear in the proj-
ect tree, so double-click the spline file to be edited.
(The file can also be opened by selecting the spline file and clicking [Open] in the mouse context menu.)
Fig.7-43:Opening a spline file saved in the personal computer
■Opening a spline file saved in the controller
Select [Online] → [Spline] for the target project and expand it. The spline files saved in the controller will
appear in the project tree, so double-click the spline file to be edited.
(The file can also be opened by selecting the spline file and clicking [Open] in the mouse context menu.)
Fig.7-44:Opening a spline file saved in the controller
 Loading...
Loading...



