Appendix-698 Cooperative operation function
7Appendix
(2) Adjustment 2: Setting of the common tool
Use the robot program BFRM.prg to set the common tool in robot No.1 and robot No.2. (Establish the tool
position at midpoint between the workpiece grasp positions for robot No.1 and robot No.2.)
■Outline of setting procedure
1) Teach the workpiece grasp positions for robot No.1 and robot No.2. (PPK1, PPK2)
(PPK1: Workpiece picking position of robot 1. PPK2: Workpiece picking position of robot 2.)
2) Set the tool coordinate of robot 1.
<Program>
PBT=(PPK1+PPK2)/2 ‘ Determine the midpoint by calculation between the work-
piece removing positions for robot No.1 and robot No.2.
PTL=Inv(PPK1)*PBT ‘ Determine the common tool by calculation in robot No.1 and
robot No.2.
Tool PTL
3) Set the tool coordinate of robot 2.
<Program>
PBT=(PPK1+PPK2)/2 ‘ Determine the midpoint by calculation between the work-
piece removing positions for robot No.1 and robot No.2.
PTL=Inv(PPK2)*PBT ‘ Determine the common tool by calculation in robot No.1 and
robot No.2.
Tool PTL
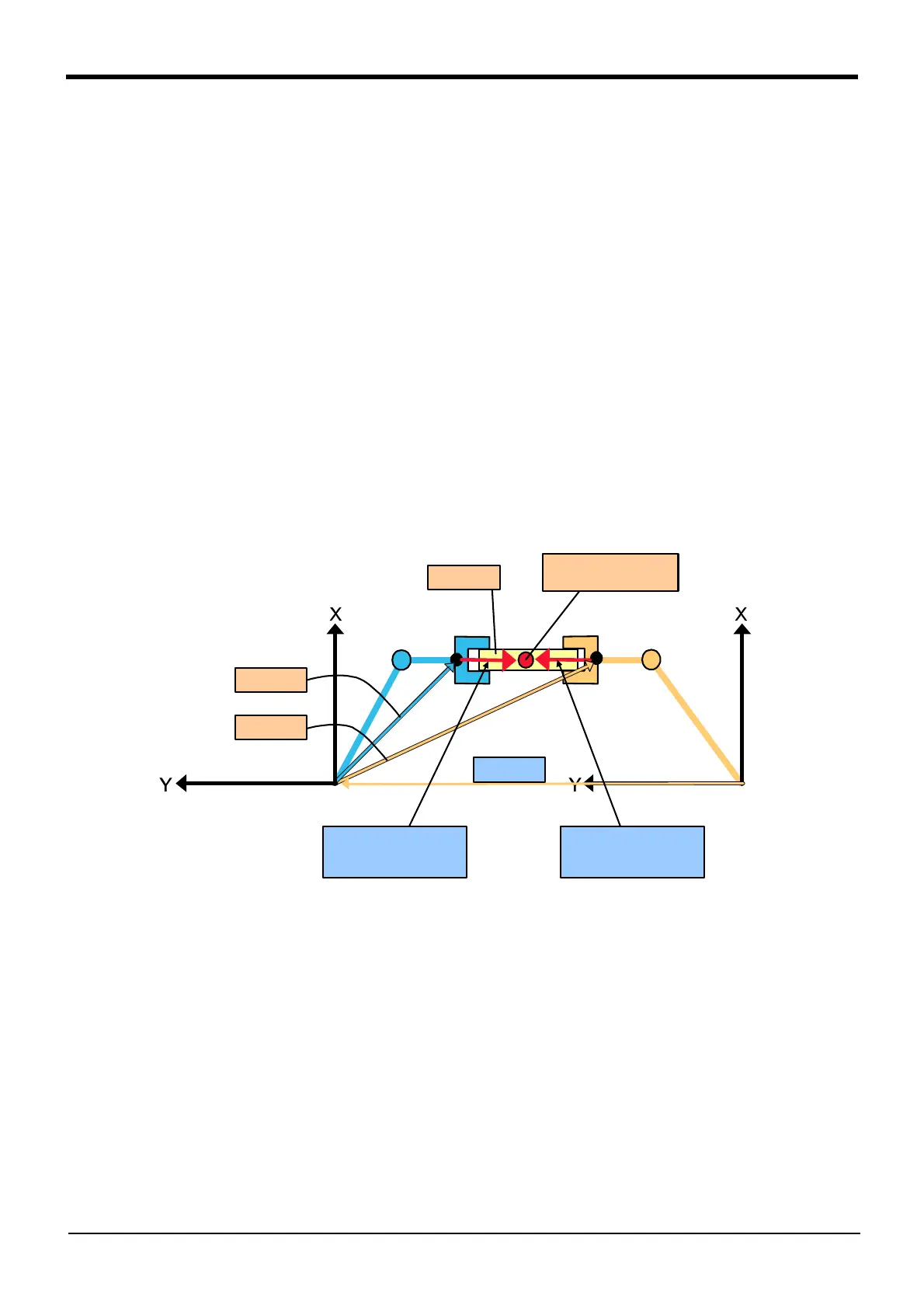
Fig.7-122:Setting of the common tool
Common tool
position
Wprkpiece
PPK1
PPK2
PBASE
Robot No.1 tool
(PLT1)
Robot No.2 tool
(PLT2)
Robot No.1
(Master)
Robot No.2
(Slave)
 Loading...
Loading...



