3Explanation of operation methods
Debugging 3-49
Take special care to the robot movements during automatic operation. If any
abnormality occurs, press the [EMG. STOP] switch and immediately stop the
robot.
(3) Step feed in another slot
When checking a multitask program, it is possible to perform step feed in the confirmation screen of the
operation menu, not in the edit screen.
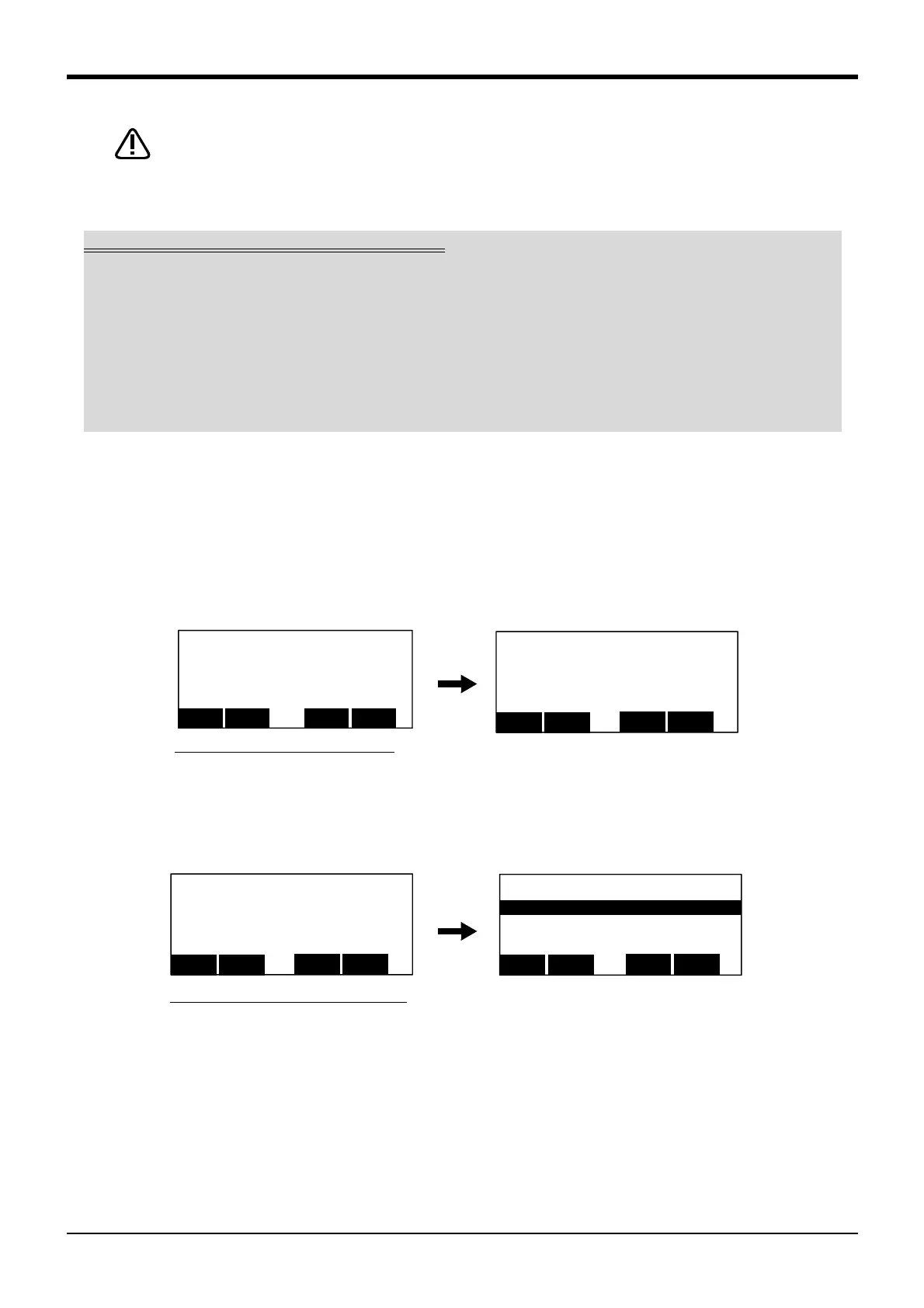
1) Selection of the operation menu
Press the [2] keys in the menu screen and select "2. RUN".
2) Selection of the confirmation screen
Press the [1] keys in the menu screen and select "1. CHECK".
Display the program set as the slot 1. The program name is displayed following the slot number.
Immediately stopping the robot during operation
・Press the [EMG. STOP] (emergency stop) switch.
The servo will turn OFF, and the moving robot will immediately stop.
To resume operation, reset the alarm, turn the servo ON, and start step operation.
・Release or for cibly press the "enable" switch.
The servo will turn OFF, and the moving robot will immediately stop.
To resume operation, lightly press the "enable" switch, and start step operation.
・Release the [F1] ("FWD") key.
The step execution will be stopped. The servo will not turn OFF.
To resume operation, press the [F1] ("FWD") key.
<RUN>
1.CHECK 2.TEST RUN
3.OPERATION
CLOSE
123
<MENU>
1.FILE/EDIT 2.RUN
3.PARAM. 4.ORIGIN/BRK
5.SET/INIT. 6.ENHANCED
CLOSE
123
Display the run menu screen [2]
<CHECK> SLOT 1 1 50%
1 Mov P1
2 Mov P2
3 Mov P3
4 Mov P4
BWD
123
Jump
FWD
SLOT
⇒
<RUN>
1.CHECK 2.TEST RUN
3.OPERATION
CLOSE
123
Display the check menu screen [2]
 Loading...
Loading...



