6-524 Interference avoidance function
5Functions set with parameters
5.24.1 Operation procedures
The outline of procedures for using the interference avoidance function is given below.
(1) Checking for interference between robots (Only for CR7xx-Q controller)
(2) Checking for interference between robot and free plane limit
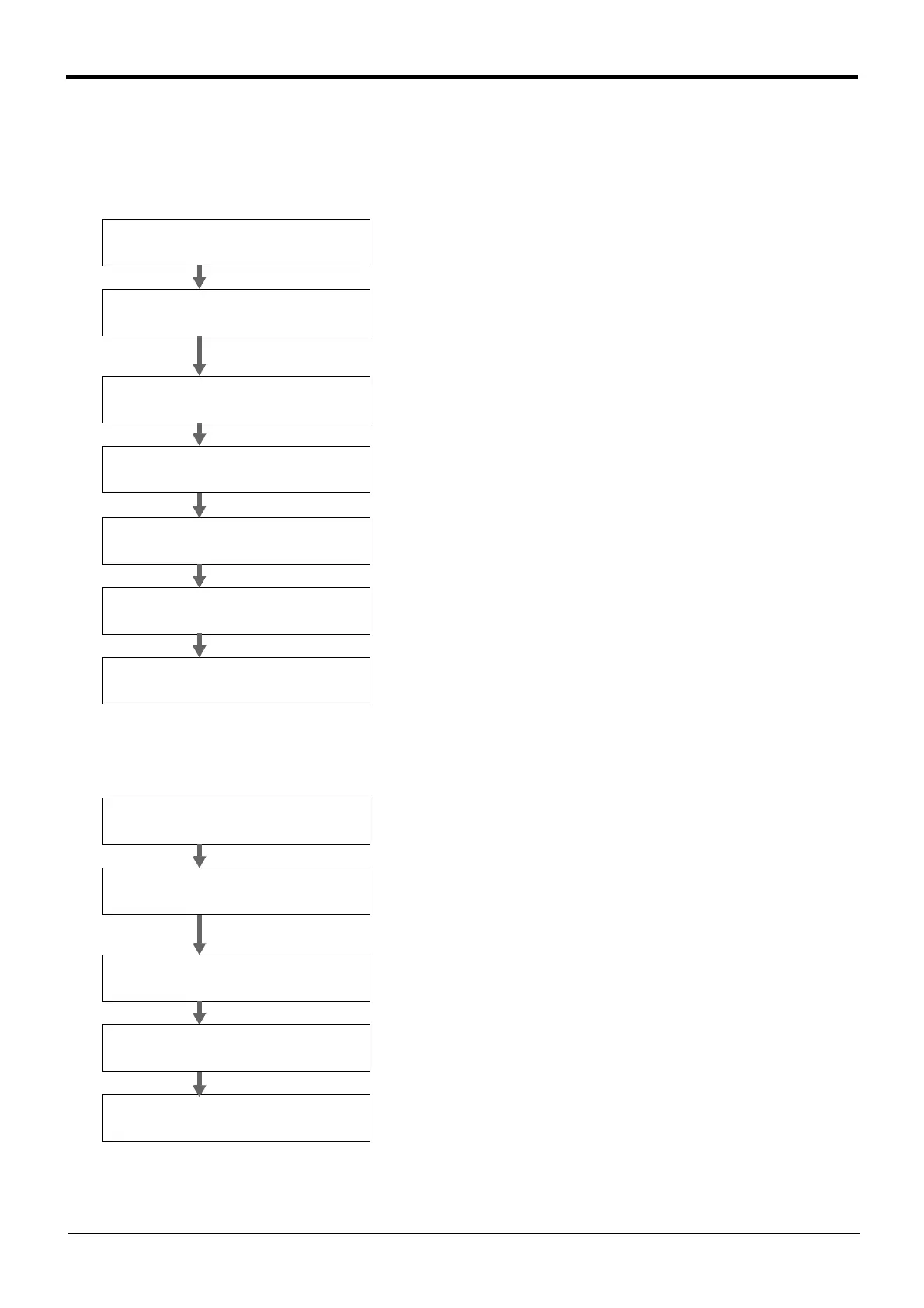
<Flow of operations>
(1)Preparing and connecting the
devices
...
Prepare two or three target robots and a personal computer equipped with RT
ToolBox2.
Refer to Page 525, "5.24.2 Preparing and connecting the devices" for details.
(2)Registering simulated compo-
nents for interference check
...
Using the robot arm as the reference, set the position and size with parameters
for the robot arm, hand and workpiece for which the interference is to be
checked and avoided.
Refer to Page 526, "5.24.3 Registering the simulated components for interfer-
ence check" for details.
(3)Setting the additional axis syn-
chronization
...
When using a linear axis, such as a locomotion axis, as an additional axis, set
the synchronous control parameters.
Refer to Page 536, "5.24.5 Support of additional axes" for details.
(4)Setting the direct communication
between robot CPUs
...
Set the shared memory expanded function with parameters.
(This function has a shared memory for communication between robot CPUs.)
Refer to Page 537, "5.24.6 Setting the shared memory expanded function
(Checking for interference between robots)" for details on setting the function.
(5)Calibrating and checking the
robots
...
Set and confirm the positional relation of multiple robots.
Refer to Page 539, "5.24.7 Calibration between robots (Checking for interfer-
ence between robots)" for details.
(6)Setting the interference avoidance
function
Enable the interference avoidance function with parameters.
Refer to Page 541, "5.24.8 Enabling and disabling the interference avoidance
function" for details.
(7)Using the interference avoidance
function
...
The interference avoidance operation during jog operation and program exe-
cution are explained in the section starting on Page 541, "5.24.9 Using the
interference avoidance function".
Sample programs are given on Page 543, "5.24.10 Sample programs".
<Flow of operations>
(1)Preparing and connecting the
devices
...
Prepare two or three target robots and a personal computer equipped with RT
ToolBox2.
Refer to Page 525, "5.24.2 Preparing and connecting the devices" for details.
(2)Registering simulated compo-
nents for interference check
...
Using the robot arm as the reference, set the position and size with parameters
for the robot arm, hand and workpiece for which the interference is to be
checked and avoided.
Refer to Page 526, "5.24.3 Registering the simulated components for interfer-
ence check" for details.
(3)Setting the additional axis syn-
chronization
...
When using a linear axis, such as a locomotion axis, as an additional axis, set
the synchronous control parameters.
Refer to Page 536, "5.24.5 Support of additional axes" for details.
(4)Setting the interference avoidance
function
Enable the interference avoidance function with parameters.
Refer to Page 541, "5.24.8 Enabling and disabling the interference avoidance
function" for details.
(5)Using the interference avoidance
function
...
The interference avoidance operation during jog operation and program exe-
cution are explained in the section starting on Page 541, "5.24.9 Using the
interference avoidance function".
Sample programs are given on Page 543, "5.24.10 Sample programs".
 Loading...
Loading...



