3-32 Aligning the Hand
3Explanation of operation methods
3.5 Aligning the Hand
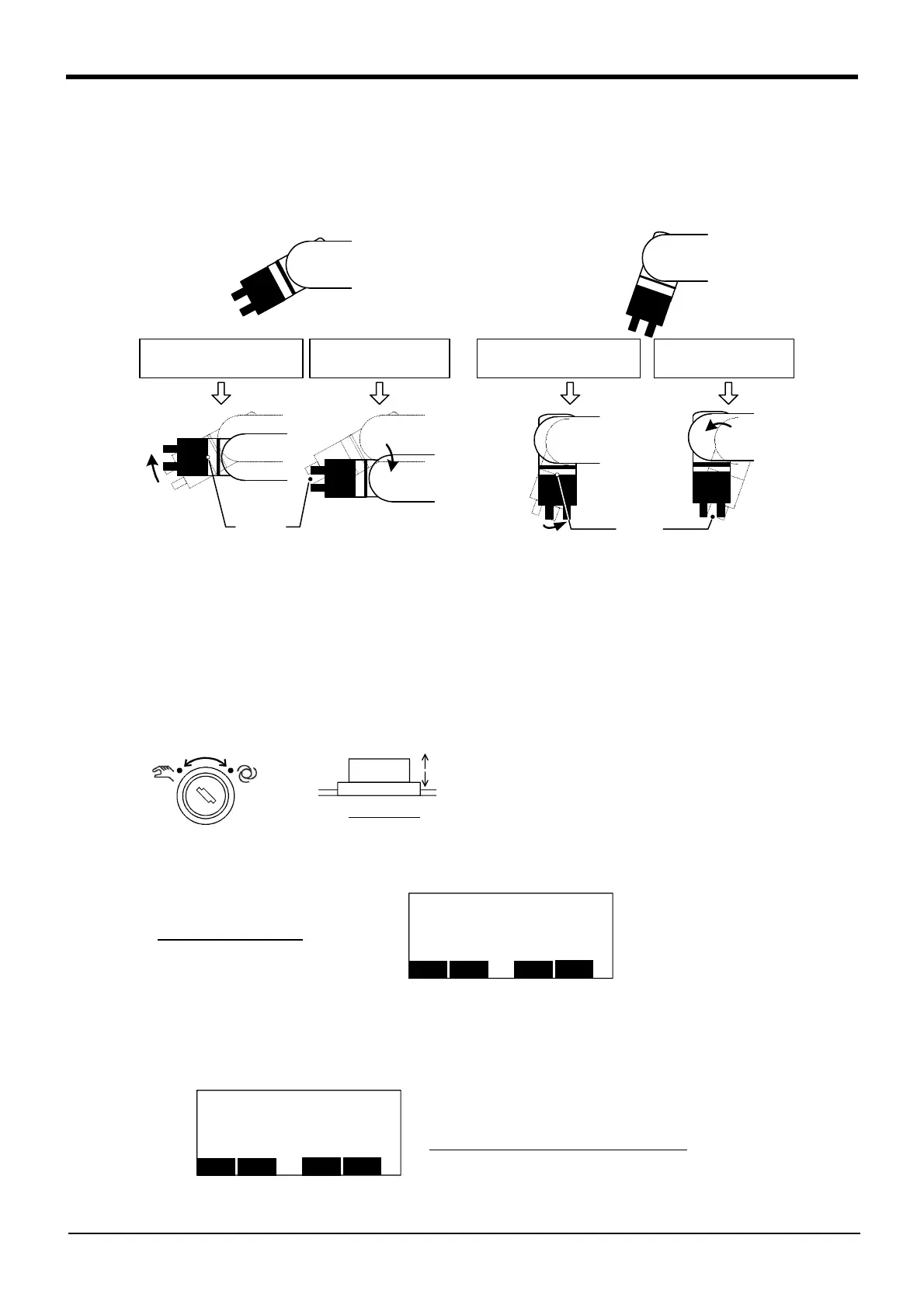
The posture of the hand attached to the robot can be aligned in units of 90 degrees.
This feature moves the robot to the position where the A, B and C components of the current position are
set at the closest values in units of 90 degrees.
If the tool coordinates are specified by the Tool command or parameters, the hand is aligned at the specified
tool coordinates. If the tool coordinates are not specified, the hand is aligned at the center of the mechanical
interface. The above illustration shows an example of a small vertical robot. [With Tool Coordinate Specifica-
tion] indicates when the tool coordinates are specified at the tip of the hand. For more information about the
tool coordinates, refer to Page 471, "5.6 Standard Tool Coordinates".
The hand alignment procedure is as follows:
1) Set the controller mode to "MANUAL". Push the [ENABLE] switch of T/B and enable T/B.
2) Press down the enabling switch (3 position switch), press the [SERVO] key and carry out servo-on.
3) Press the "HAND" key and display the <hand> screen.
4) Pressing the function key currently assigned to "ALIGN" is kept with the enabling switch (3 position
switch) pressed down. While keeping pushing, the robot does hand alignment movement and
[START] LED of the controller unit turns on during movement.
If either is detached in the middle of movement, the robot will stop.
Without tool coordinate
specification.
With tool coordinate
specification.
Without tool coordinate
specification
.
With tool coordinate
specification.
Control
point
Control
point
Down:
ENABLE
*Lighting
Up :
DISABLE
Rear of T/B
<HAND> ±C : HAND1 ±Z : HAND4
±B : HAND2 ±Y : HAND5
±A : HAND3 ±X : HAND6
76543210 76543210
OUT-900□□□□□□ IN-900□□□□□□
CLOSE
HND
ALIGN
SAFE
Execution of hand alignment "ALIGN"
<HAND> ±C : HAND1 ±Z : HAND4
±B : HAND2 ±Y : HAND5
±A : HAND3 ±X : HAND6
76543210 76543210
OUT-900□□□□□□ IN-900□□□□□□
CLOSE
HND
ALIGN
SAFE
 Loading...
Loading...



