4-106 MELFA-BASIC V functions
4MELFA-BASIC V
(7) High path accuracy control
It is possible to improve the motion path tracking when moving the robot. This function is limited to certain
types of robot. Currently, the Prec instruction is available for vertical multi-joint type 5-axis and 6-axis robots.
*Command word
*Statement example
*Program example
•Program example
The Prec instruction improves the tracking accuracy of the robot's hand tip, but low-
ers the acceleration/deceleration of the robot movement, which means that the cycle
time may become longer. The tracking accuracy will be further improved if the Cnt
instruction is not included. However, the hand tip speed cannot be guaranteed in this
case.
Command word
Explanation
Prec This instruction specifies whether the high path accuracy mode should be enabled or disabled.
Statement example
Explanation
Prec On ............................................................................
Enables the high path accuracy mode.
Prec Off.............................................................................
Disables the high path accuracy mode.
Program Explanation
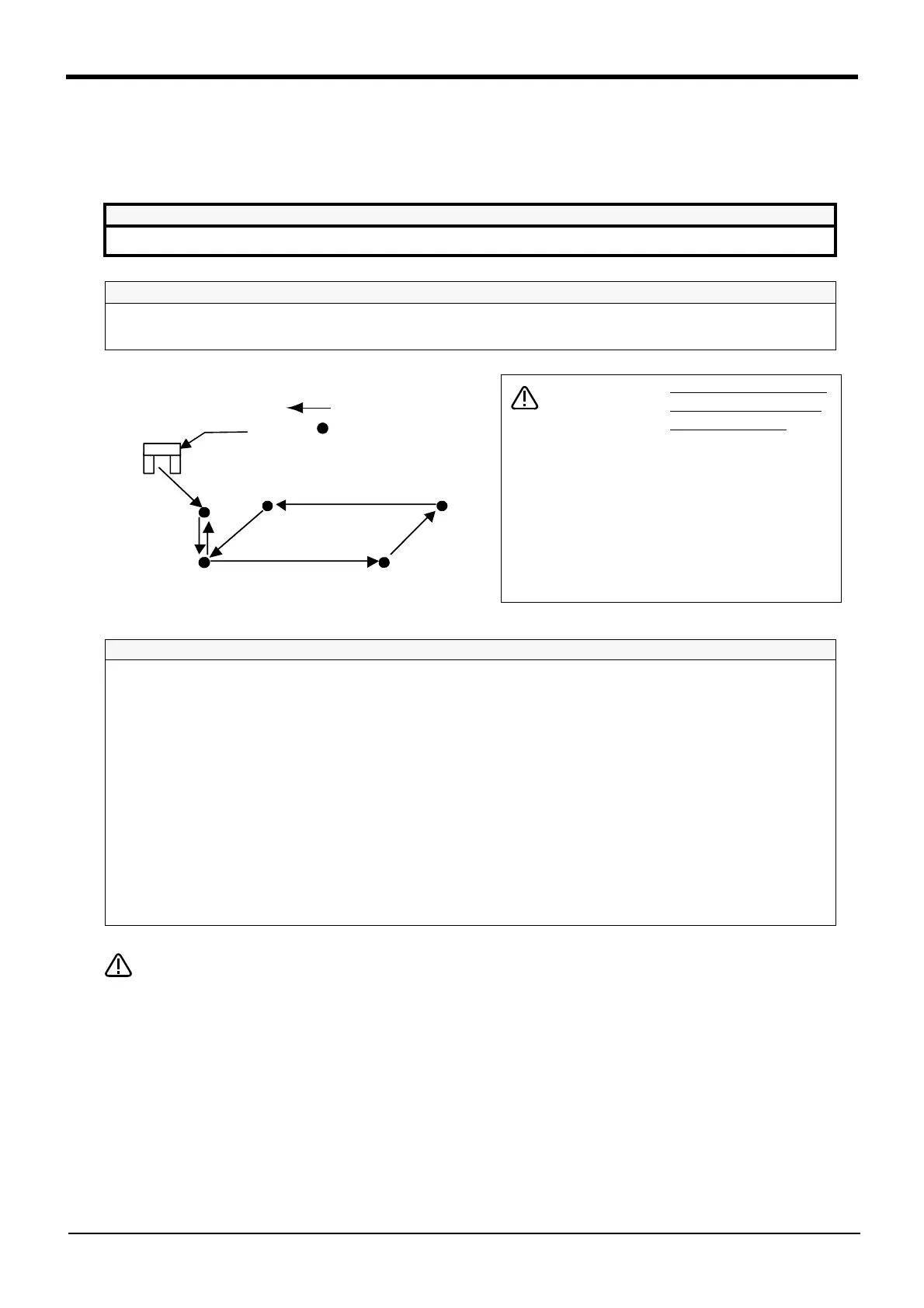
1Mov P1, -50 *1)
'
(1)
Moves with joint interpolation from P1 to position retracted 50mm in hand direction.
2 Ovrd 50 ' Sets the movement speed to half of the maximum speed.
3 Mvs P1
'
(2)
Moves with linear interpolation to P1.
4 Prec On ' The high path accuracy mode is enabled.
5 Mvs P2
'
(3)
Moves the robot from P1 to P2 with high path accuracy.
6 Mvs P3
'
(4)
Moves the robot from P2 to P3 with high path accuracy.
7 Mvs P4
'
(5)
Moves the robot from P3 to P4 with high path accuracy.
8 Mvs P1
'
(6)
Moves the robot from P4 to P1 with high path accuracy.
9 Prec Off ' The high path accuracy mode is ÇÑisableÇÑ.
10 Mvs P1, -50 *1)
'
(7)
Returns the robot to the position 50 mm behind P1 in the hand direction using linear
interpolation.
11 End ' Ends the program.
P1
P2
P3
P4
(1)
(2)
(3)
(4)
(5)
(6)
(7)
:Movement position
:Robot movement
Hand
*1) Specification of for-
ward/backward move-
ment of the hand
*1) The statement examples and program
examples are for a vertical 6-axis robot.The
hand advance/retrace direction relies on the
Z axis direction (+/- direction) of the tool coor-
dinate set for each model.
Refer to the tool coordinate system shown in
"Confirmation of movement" in the separate
"From Robot unit setup to maintenance", and
designate the correct direction.
 Loading...
Loading...



