4MELFA-BASIC V
Detailed specifications of MELFA-BASIC V 4-141
4.4.14 Angle value
The angle value is used to express the angle in "degrees" and not in "radian".
If written as 100Deg, this value becomes an angle and can be used as an argument of trigonometric func-
tions.
Example) Sin(90Deg)............... A 90 degree sine is indicated.
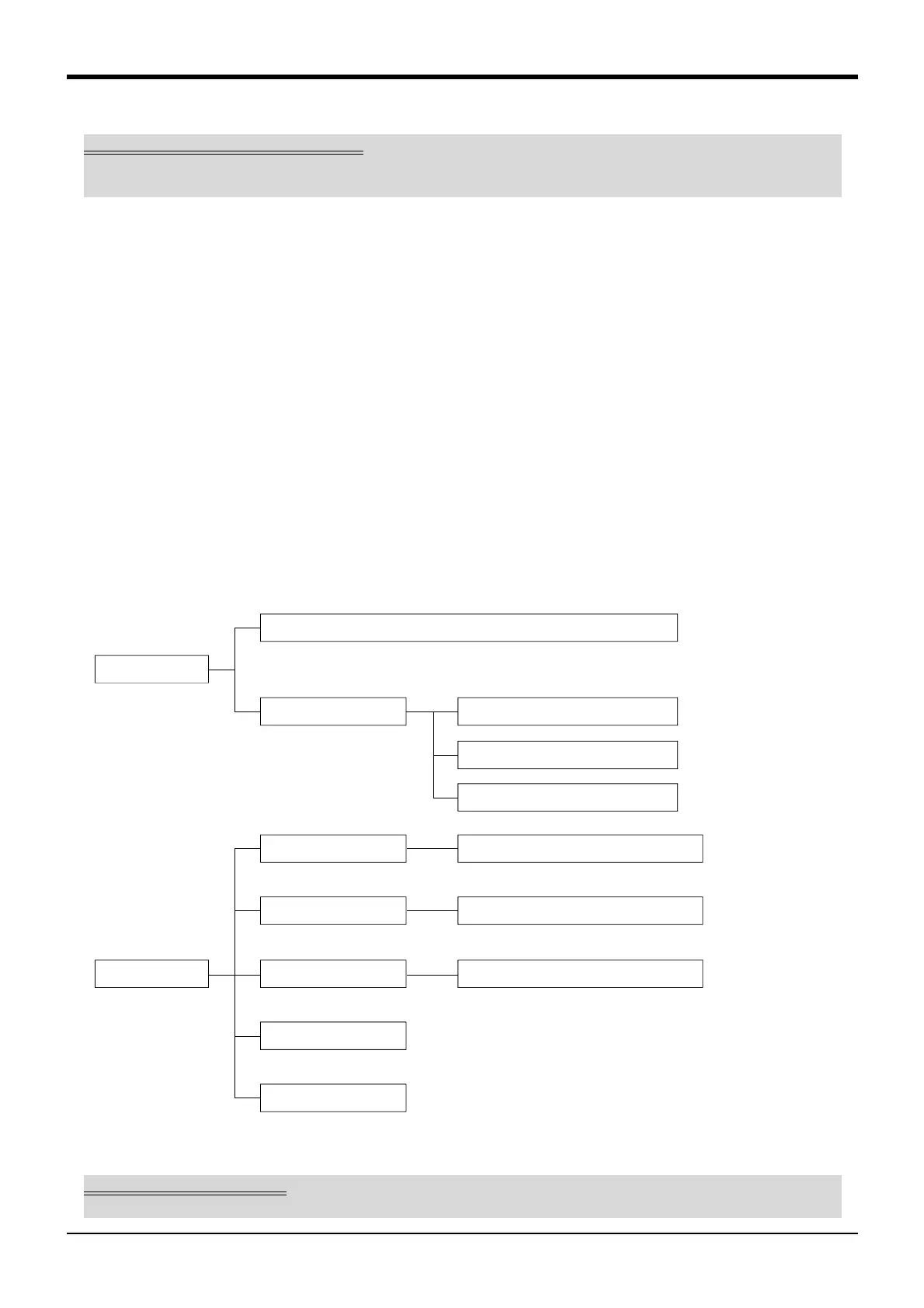
4.4.15 Variables
A variable name should be specified using up to eight characters.
The variable types include the numeric value type, character string type, position type, joint type and I/O
type. Each is called a "variable type". The variable type is determined by the head character of the identifier
(variable name).
The numeric value type can be further classified as integer type, single-precision real number type, or dou-
ble-precision real number type.
The following two types of data valid ranges are used.
1. Local variable valid only in one program
2. Robot status variable, program external variable and user-defined external variable valid over programs.
(The user-defined external variable has a _ for the second character of the variable name. Refer to Page
144, "4.4.22 External variables" for details.)
Use of variables in joint element data
The axis data is called the joint element data.
A variable cannot be contained in the joint constant data that configures the joint constant.
Note 1)
Numeric value type Integer type
Single-precision real number typeCharacter string type
Double-precision real number type
Position type
I/O type
Joint type
(Starts with M)
(Starts with C)
(Starts with P)
(Starts with J)
Variables
External variables
Types of variable
Local variable (valid only within the program)
System status variables
Program External Variables
User-defined External Variables
P_CURR, M_IN , etc.
P_00, M_00 , etc.
P1, M1 , etc.
P_100, M_100 , etc.
Note 1) The identifiers include those determined by the robot status variable
(M_IN,M_OUT, etc.), and those declared in the program with the DEFIO command.
Variables are not initialized
The variables will not be cleared to zero when generated, when the program is loaded, or when reset.
 Loading...
Loading...



