7Appendix
Ex-T control Appendix-681
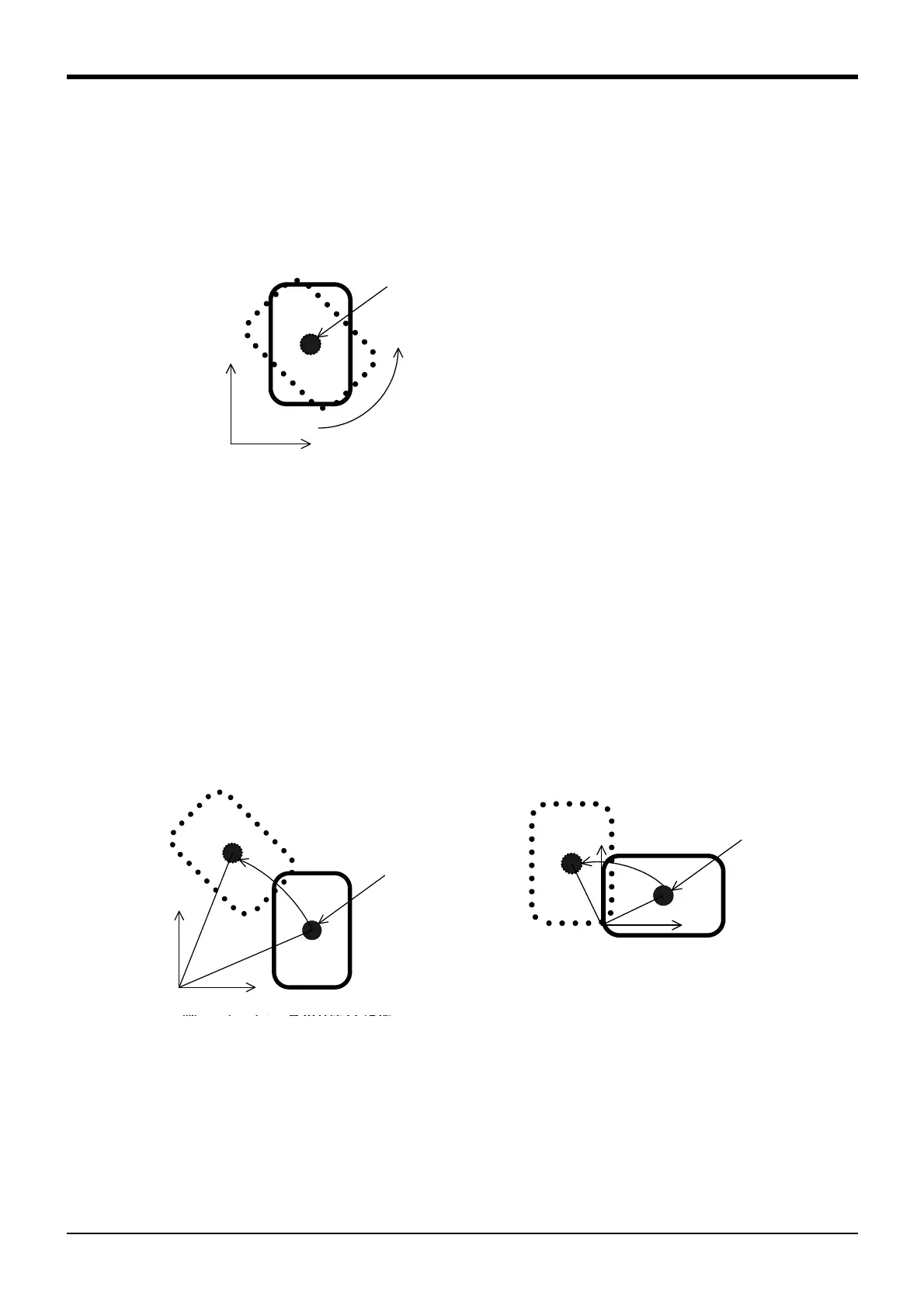
(1) Movement of the posture element in the WORK jog
The jog operation of the posture element in the WORK jog is rotation around the axes parallel to the X, Y,
and Z axes of the work coordinates at the control point. The position remains fixed.
Fig. 7-115 shows the example of C element movement in the WORK jog.
W0-Wx-Wy shows the work coordinates system (when viewed from +Wz). ● represents the robot control
point (TCP), and the square with rounded corners represents the workpiece held by the robot. The dotted
line shows the workpiece position (posture) after the movement.
Fig.7-115:Example of C element movement in the WORK jog
(2) Movement of the posture element in the Ex-T jog
The jog operation of the posture element in the Ex-T jog is rotation around the X, Y, and Z axes of the Ex-T
coordinates system (work coordinates system). The robot position also changes.
<Movement example 1> and <Movement example 2> in Fig. 7-116 show the example of C element move-
ment in the Ex-T jog.
W0-Wx-Wy shows the Ex-T coordinates system (work coordinates system) (when viewed from +Wz). ● rep-
resents the robot control point (TCP), and the square with rounded corners represents the workpiece held
by the robot. The dotted line shows the workpiece position (posture) after the movement.
In <Movement example 1>, the Ex-T coordinates system (work coordinates system) is located away from
the workpiece. In <Movement example 2>, the origin of the Ex-T coordinates system (work coordinates sys-
tem) is located on the workpiece. Rotating operation is performed around W0 in both cases.
Fig.7-116:Example of C element movement in the Ex-T jog
Wx
図xxxx:Ex-TジョグのC成分動作例2
W0
Wy
TCP
 Loading...
Loading...



