5-478 About user-defined area
5Functions set with parameters
2) If elements L1 and L2 in the parameter AREAnP1 are interchanged with those in the parameter
AREAnP2, user-defined area remains the same.
3) When the additional axis area is defined, it is judged contained in the user-defined area when all of
position area, posture area and additional axis area are within the area.
4) The judgments of inside or outside of the user definition area are 0.001mm and 0.001 degree unit.
Therefore, if the boundary line of the area, the judgment result may get unfixed.
5) If no additional axes (axes J7 and J8) are in use, the additional axis area need not be defined.
5.8.3 Selecting mechanism to be checked
Specify the mechanism to check the user-defined area with parameter AREA*ME. Normally, specify Mecha-
nism 1 (1). When using the multi-mechanism etc, set up the corresponding mechanism number.
5.8.4 Specifying behavior within user-defined area
Specify the behavior of whether the robot is in the user-defined area area by setting of parameter AREAnAT.
The behavior prepared is shown in Table 5-11.
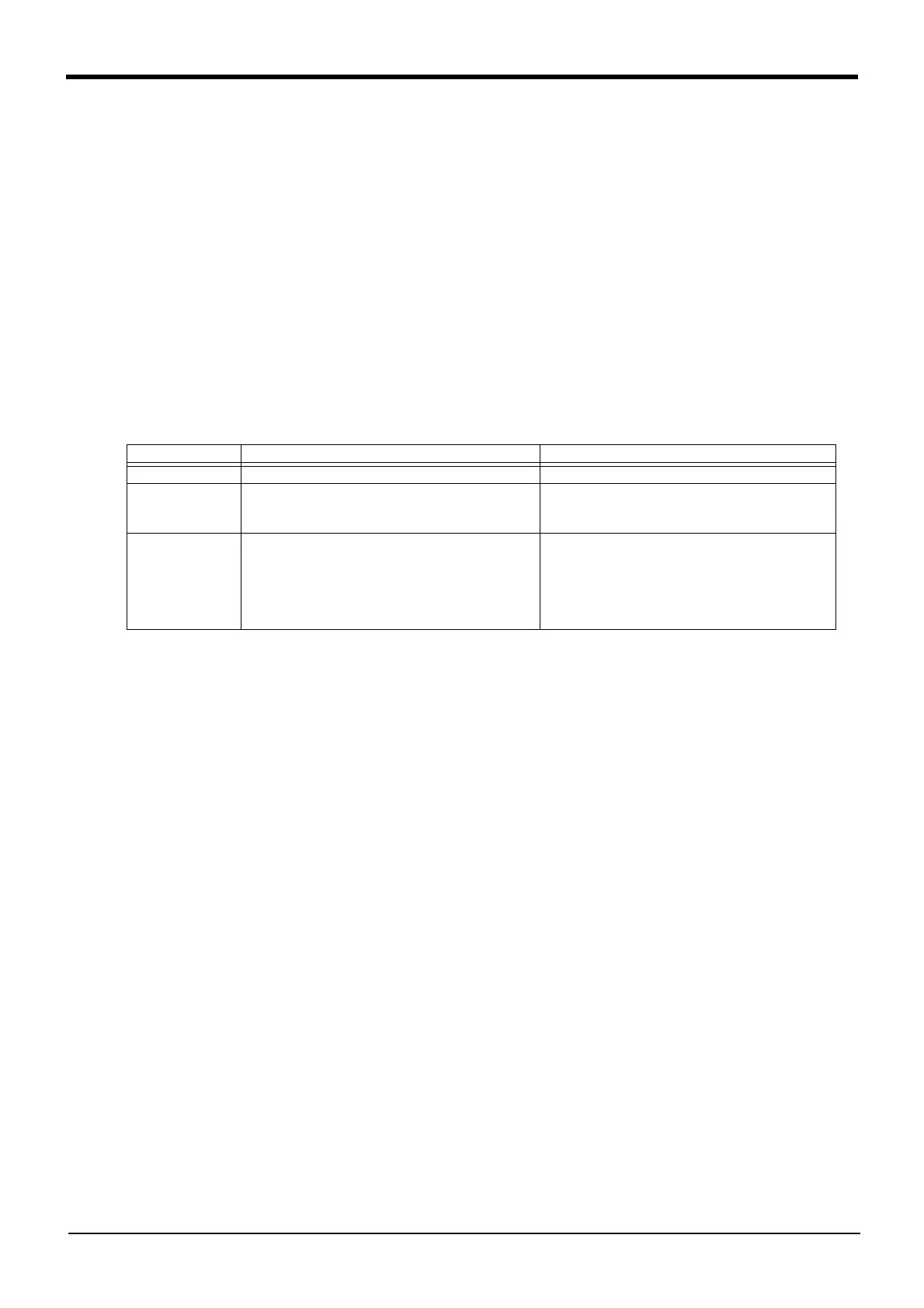
Table 5-11:Specifying behavior within user-defined area
Settings Within user-defined area Outside user-defined area
0: Invalid System's behavior is not specified. System's behavior is not specified.
1: Signal output and
status variable set-
ting
Dedicated output signal USRAREA is turned on.
Corresponding bit of system status variable
(M_Uar32,M_Uar) is turned on.
Dedicated output signal USRAREA is turned off.
Corresponding bit of system status variable
(M_Uar32,M_Uar) is turned off.
2. Error output Error H2090 occur and the robot stops.
* In this case, checks the position area only, ignoring
posture area and additional axis area.
* To move the robot out of area, use the jog operation
by "Temporarily Reset an Error that Cannot Be Can-
celed"
-
 Loading...
Loading...



