10
FUNCTIONS AND PROGRAMMING
10.2 Programming Using Bus Interface Functions
10.2.4 Programming using bus interface functions
10 - 14
9
UTILITY OPERATION
10
FUNCTIONS AND
PROGRAMMING
11
OVERVIEW OF
MULTIPLE CPU
SYSTEM
12
MULTIPLE CPU
SYSTEM
CONFIGURATION
13
MULTIPLE CPU
SYSTEM
CONCEPT
14
COMMUNICATIONS
BETWEEN CPU
MODULES
15
PARAMETERS
ADDED FOR
MULTIPLE CPU
16
PRECAUTIONS FOR
USE OF AnS SERIES
MODULE
10.2.4 Programming using bus interface functions
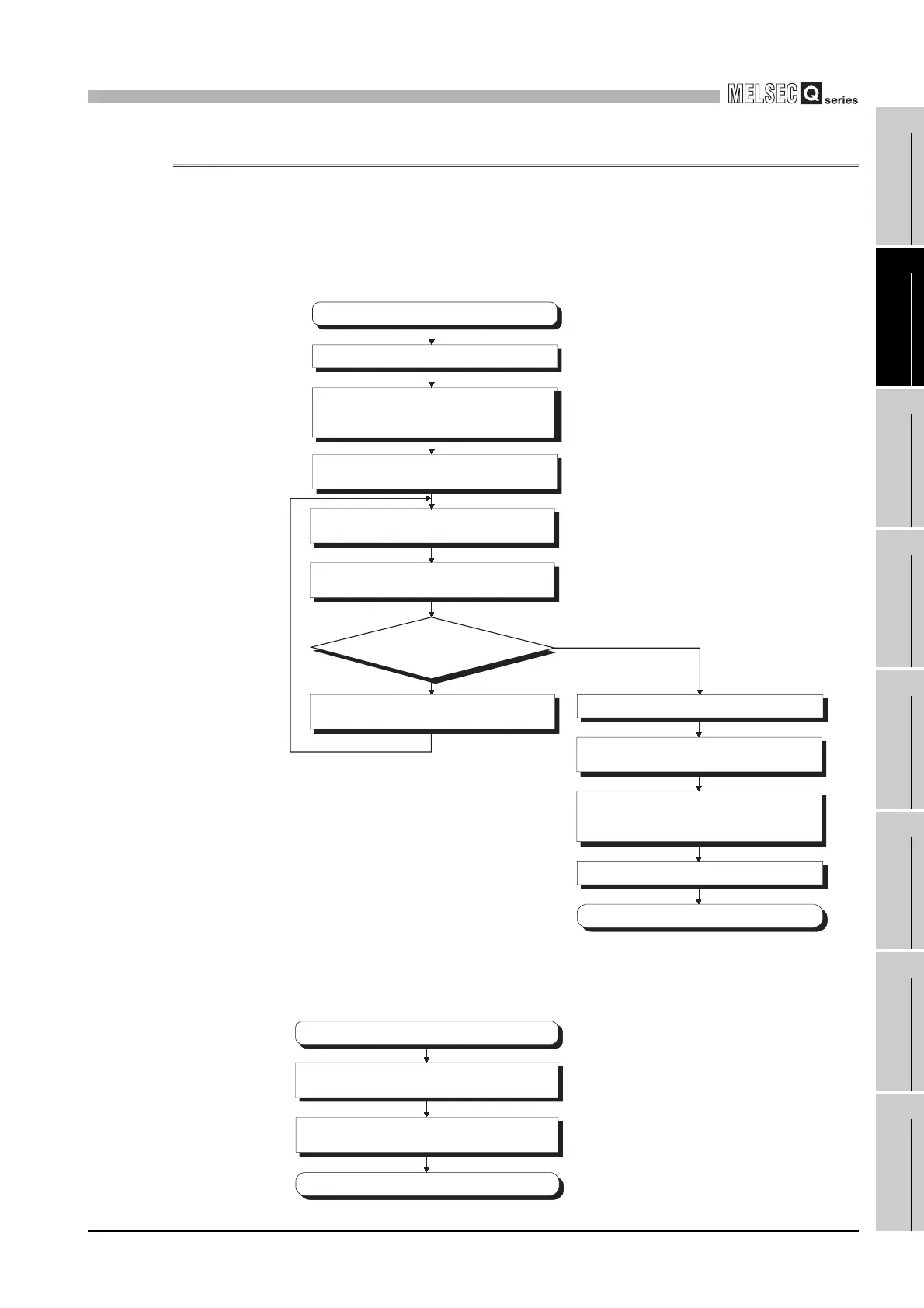
Using the bus interface functions, perform programming in the following procedure.
(1) Programming outline
The procedure for creating a user program using the bus interface functions is shown
below.
The following outlines the procedure for the case where a user watchdog timer error
interrupt has occurred.
Figure 10.4 Bus interface function programming flow
Figure 10.5 User watchdog timer error interrupt programming outline
Register a routine to the user watchdog
timer error interrupt.
(QBF_EntryWDTInt function)
Open the bus. (QBF_Open function)
Task start
Has error occurred?
No (Normal)
Yes (Error occurrence)
Set and start the watchdog timer.
(QBF_StartWDT function)
Control the module using the bus
interface functions.
Get the information of the C Controller
module. (QBF_ReadStatusEx function)
Reset the watchdog timer.
(QBF_ResetWDT function)
Set the watchdog timer for the user
program.
It checks the hardware and system for user
program runaway or processing overtime.
This process can be omitted when check is
not necessary.
*1
Error notification
Task end
Stop the watchdog timer.
(QBF_StopWDT function)
Deregister the routine of the user watchdog
timer error interrupt.
(QBF_EntryWDTInt function)
Close the bus. (QBF_Close function)
*1
*1
*1
*1
Interrupt routine start
*2
*2
*2
Access the SRAM data.
(QBF_WriteSRAM/QBF_ReadSRAM function)
Register the event history.
(QBF_RegistEventLog function)
Interrupt routine end
Interrupt routine (Since execution starts
from ISR, specify "1" (ISR) for the argumen
flg of the function.)

 Loading...
Loading...





