14
COMMUNICATIONS BETWEEN CPU MODULES
14.8 Motion CPU Device Access
14 - 22
9
UTILITY OPERATION
10
FUNCTIONS AND
PROGRAMMING
11
OVERVIEW OF
MULTIPLE CPU
SYSTEM
12
MULTIPLE CPU
SYSTEM
CONFIGURATION
13
MULTIPLE CPU
SYSTEM
CONCEPT
14
COMMUNICATIONS
BETWEEN CPU
MODULES
15
PARAMETERS
ADDED FOR
MULTIPLE CPU
16
PRECAUTIONS FOR
USE OF AnS SERIES
MODULE
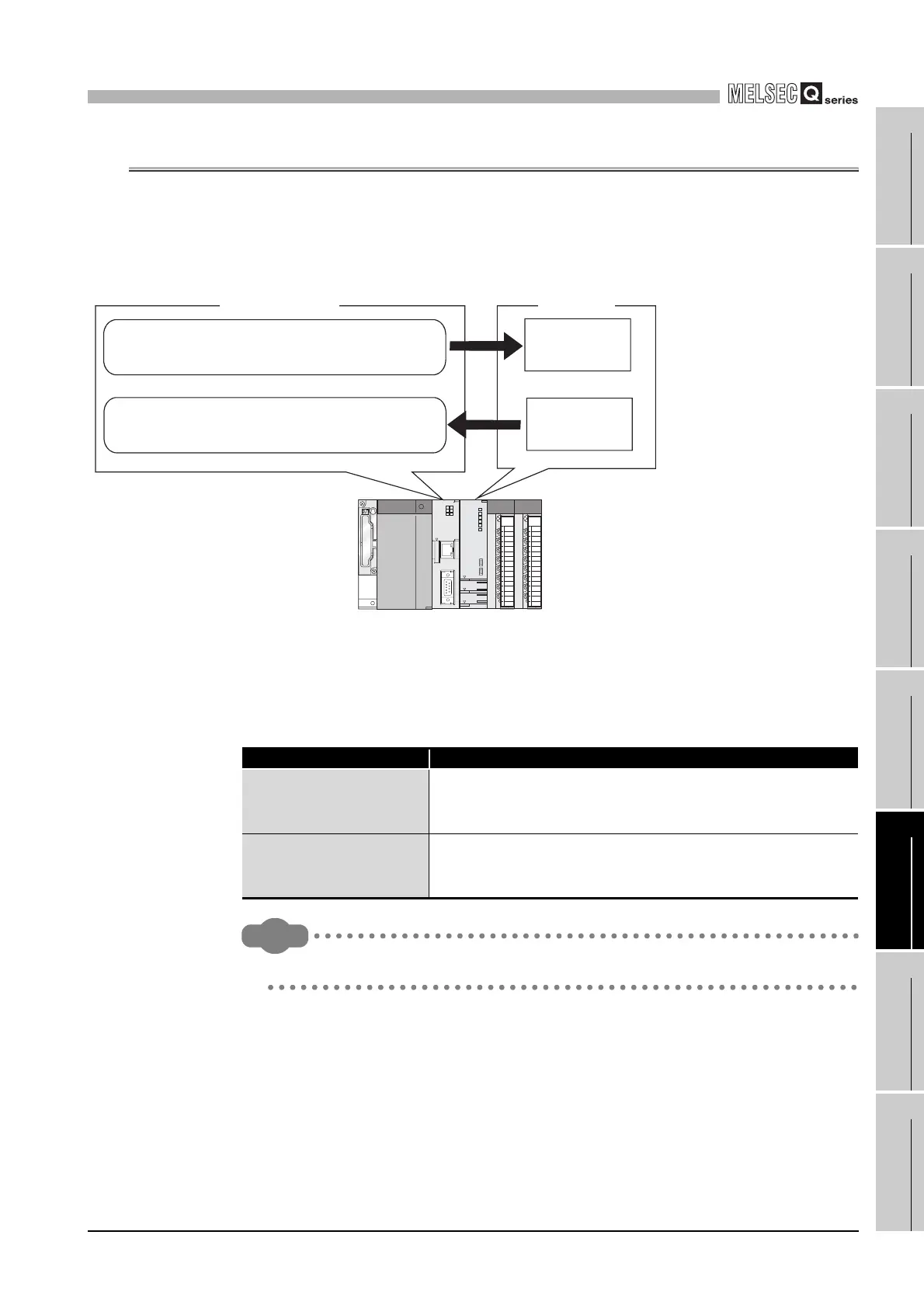
14.8 Motion CPU Device Access
(1) Motion CPU device access
This function allows data writing/reading from the user program of the C Controller
module to the Motion CPU devices.
Use the bus interface functions to create the user program of the C Controller module.
(2) Functions
The following indicates the functions used for the Motion CPU device access.
Remark
Refer to Chapter 10 for details of the bus interface functions.
Figure 14.19 Motion CPU device access
Table14.16 Function used for Motion CPU device access
Function name Function
QBF_MotionDDWR
Writes data to the Motion CPU device.
(Equivalent to the S(P).DDWR instruction of the programmable
controller CPU)
QBF_MotionDDRD
Reads data from the Motion CPU device.
(Equivalent to the S(P).DDRD instruction of the programmable
controller CPU)
C Controller module
/* Write to Motion CPU device */
ret = QBF_MotionDDWR(path, sCpuNo, sDeType, ulDevNo,
ulSize, pusDataBuf, ulBufSize, ulTimeout);
2)
1) Writes data to the Motion CPU device.
Motion CPU
Device memory
/* Read from Motion CPU device */
ret = QBF_MotionDDRD(path, sCpuNo, sDeType, ulDevNo,
ulSize, pusDataBuf, ulBufSize, ulTimeout);
Device memory
1)
2) Reads data from the Motion CPU device.

 Loading...
Loading...





