14 - 21
14.7 Motion CPU Control Instruction
14
COMMUNICATIONS BETWEEN CPU MODULES
14.7 Motion CPU Control Instruction
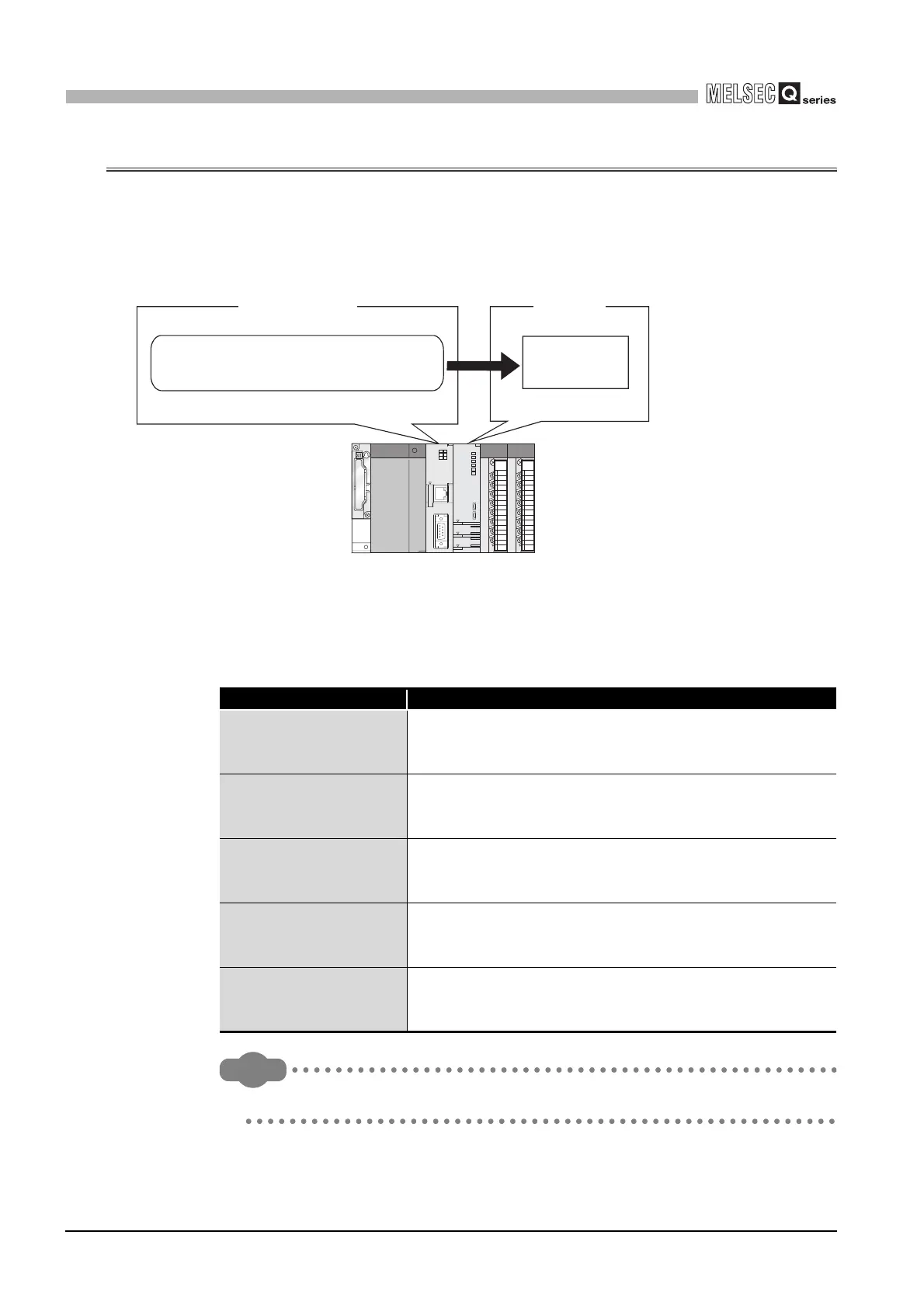
(1) Motion CPU control instruction
This function gives a control instruction to the Motion CPU from the user program of
the C Controller module.
Use the bus interface function to create the user program of the C Controller module.
(2) Functions
The following indicates the functions used for the Motion CPU control instruction.
Remark
Refer to Chapter 10 for details of the bus interface functions.
Figure 14.18 Motion CPU control instruction
Table14.15 Function used for Motion CPU control instruction
Function name Function
QBF_MotionSFCS
Requests a motion SFC program start.
(Equivalent to the S(P).SFCS instruction of the programmable
controller CPU)
QBF_MotionSVST
Requests the specified servo program start.
(Equivalent to the S(P).SVST instruction of the programmable
controller CPU)
QBF_MotionCHGA
Requests the present value change of the specified axis.
(Equivalent to the S(P).CHGA instruction of the programmable
controller CPU)
QBF_MotionCHGV
Requests the speed change of the specified axis.
(Equivalent to the S(P).CHGV instruction of the programmable
controller CPU)
QBF_MotionCHGT
Requests the torque limit value change of the specified axis.
(Equivalent to the S(P).CHGT instruction of the programmable
controller CPU)
C Controller module
/* Motion SFC program start request */
ret = QBF_MotionSFCS(path, sCpuNo,
sProgramNo, ulTimeout);
1)
1) Requests a motion SFC program
start from the C Controller module.
Motion CPU
SFC program

 Loading...
Loading...





