216 Rockwell Automation Publication 2198-UM001M-EN-P - November 2022
Appendix D Motor Control Feature Support
Current Limiting for
Frequency Control
The current limiting module prevents the OutputCurrent value from
exceeding the OperativeCurrentLimit value when the drive is configured in
Frequency Control mode.
Figure 119 - Current Limiting Module
In Frequency Control mode, OperativeCurrentLimit is the minimum value of
the motor-thermal current limit, inverter-thermal current limit, motor-peak
current limit, drive-peak current limit, and the CurrentVectorLimit value.
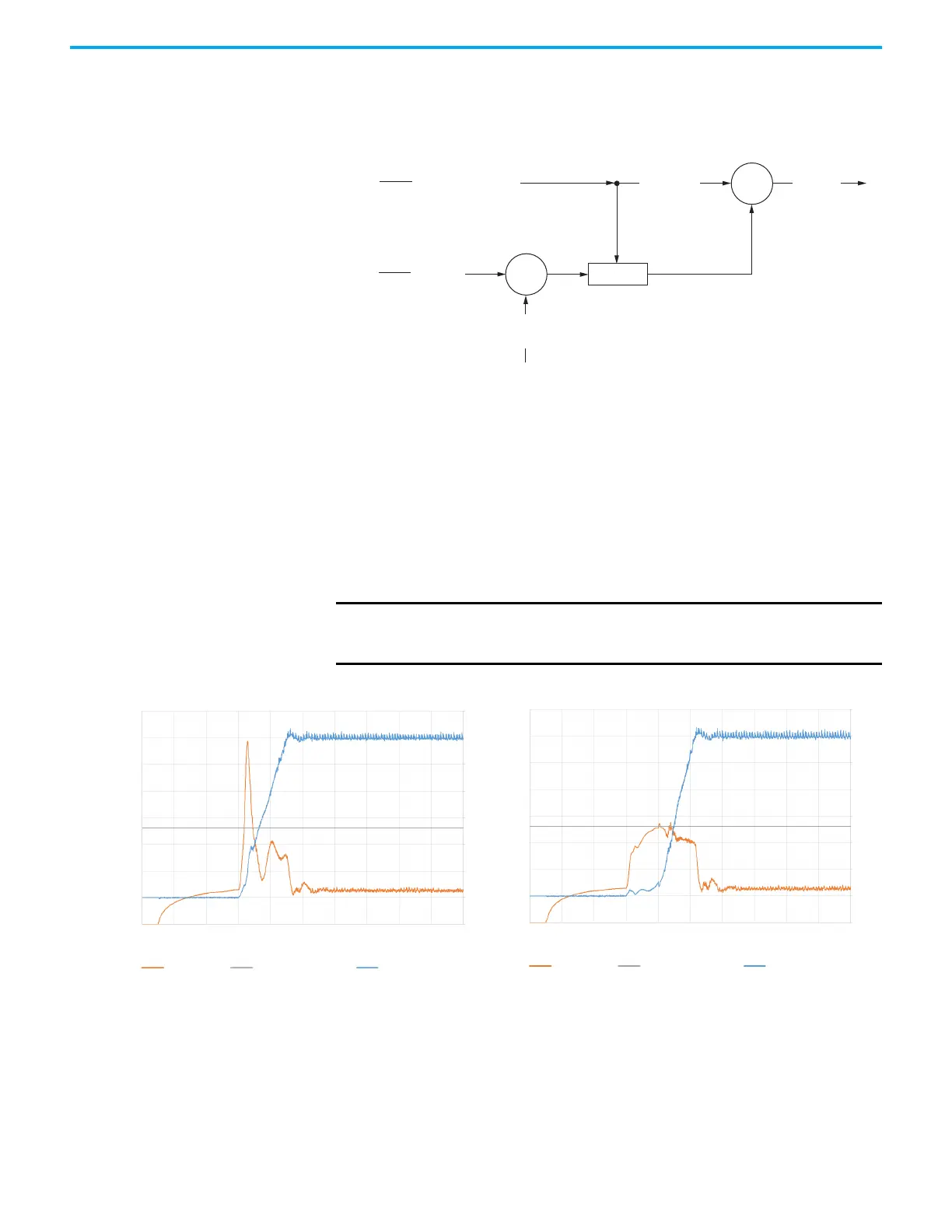
The Effects of Current Limiting
Indirect current limiting is available for induction motors that are configured
for frequency control. You can use this feature to help prevent overcurrent
faults due to aggressive acceleration/deceleration profiles or impact loads. The
Current Limiting attribute uses a PI regulator to control the OutputCurrent by
adjusting the velocity reference.
Figure 120 - Effects of Current Limiting on an Aggressive Acceleration
Velocity from Planner
(MAJ)
Fine
Command
Velocity
Velocity
Reference
PI
Operative
Current Limit
Output
Current
IMPORTANT When configured for Frequency Control (induction motors only), select
the Decel and disable stopping action only when the Current Limiting
feature is enabled.
16
14
12
10
8
6
4
2
0
Output Current (Arms), Operative Current Limit (rms)
Aggressive Acceleration, No Current Limiting
70
60
50
40
30
20
10
0
-10
Frequency (Hz)
Time (ms)
Output Current Operative Current Limit
Output Frequency
16
14
12
10
8
6
4
2
0
Output Current (Arms), Operative Current Limit (rms)
Aggressive Acceleration, Current Limiting Active
70
60
50
40
30
20
10
0
-10
Frequency (Hz)
Time (ms)
Output Current Operative Current Limit
Output Frequency
0
200
400 600 800 1000 1200 1400
1600
1800
2000
0
200
400 600 800 1000 1200
1400
1600
1800 2000

 Loading...
Loading...








