Rockwell Automation Publication 2198-UM001M-EN-P - November 2022 231
Appendix D Motor Control Feature Support
Selection of Motor Thermal
Models
The Kinetix 5500 drives contain two motor thermal-overload protection
algorithms that you can use to help prevent the motor from overheating.
Generic Motors
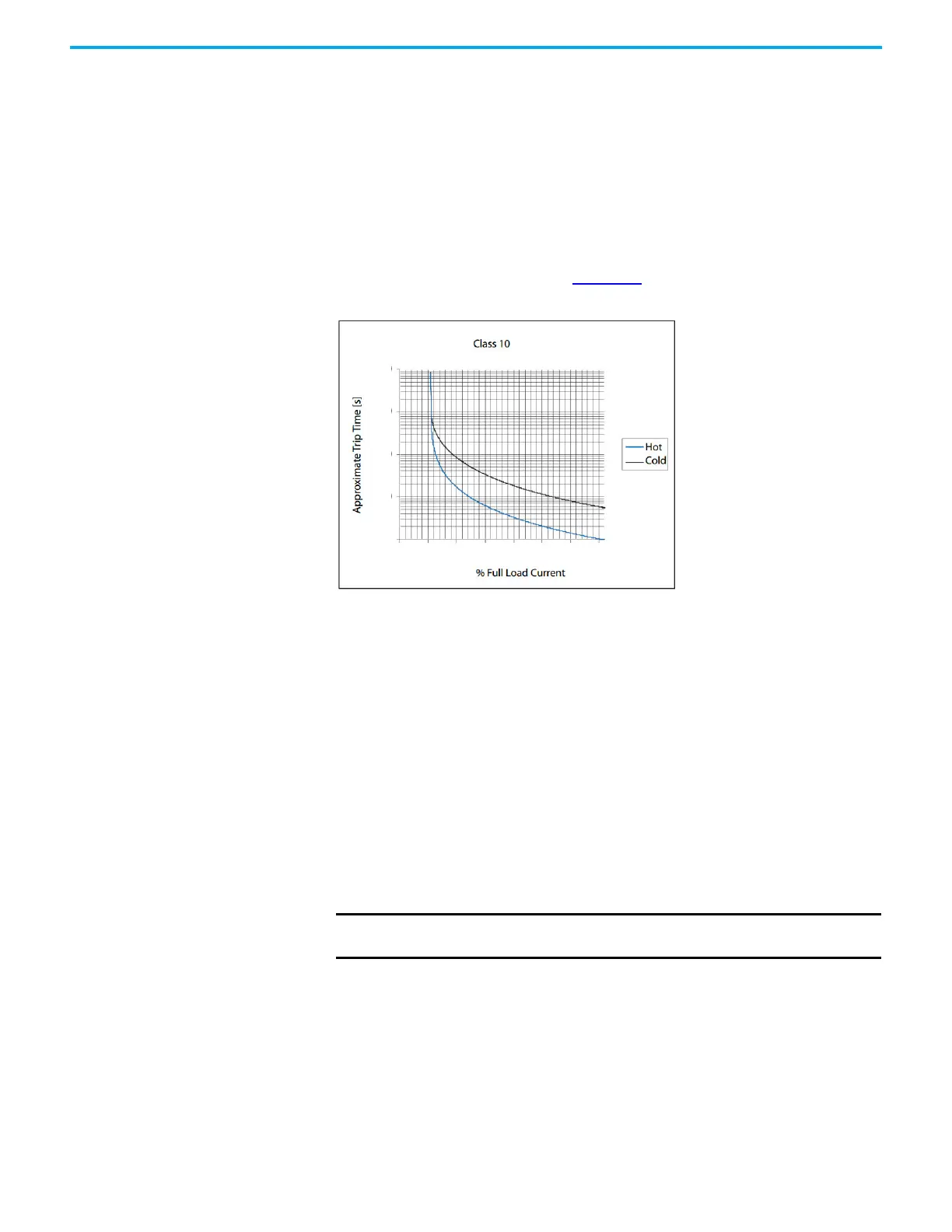
The default thermal model is a generic I
2
T Class 10 overload protection
algorithm. This model is active if the MotorWindingToAmbientResistance or
the MotorWindingToAmbientCapacitance values are 0.0. The purpose of this
algorithm is to limit the time that a motor is operating with excessive levels of
current. The relationship between Motor Overload Factory Limit trip-time and
motor output current is shown in Figure 133
.
Figure 133 - Motor Overload Curve
You can use the MotorOverloadLimit attribute (default of 100%, max of 200%)
to increase the motor overload trip-time by artificially increasing the motor
rated current (for thermal protection only). MotorOverloadLimit should only
be increased above 100% if cooling options are applied. Increasing
MotorOverloadLimit causes MotorCapacity to increase more slowly.
The generic motor thermal model also derates the motor rated current (for
thermal protection only) when operating at low speeds. The derating factor is
30% at 0 Hz and 0% at 20 Hz, with linear interpolation between. Operating at
output frequencies less than 20 Hz causes MotorCapacity to increase more
quickly.
When the generic motor thermal-model is active, the MotorCapacity attribute
increases only if the motor output current is greater than the effective motor
rated current (taking into account the MotorOverloadLimit and low speed
derating factor). The default MotorThermalOverloadFactoryLimit and
MotorThermalOverloadUserLimit values for this thermal model are both 100%.
Thermally Characterized Motors
If the MotorWindingToAmbientResistance and
MotorWindingToAmbientCapacitance attribute values are both nonzero, the
motor is considered thermally characterized and an alternate motor thermal
model is run. The purpose of this algorithm is to limit the time that a motor is
operating with excessive levels of current. This thermal model uses the first-
order time constant that is determined from the
MotorWindingToAmbientResistance and
10
100
1000
10,000
100,000
100
125
150
175
200
225
250
0
IMPORTANT The generic motor-thermal model does not support Current Foldback
as a Motor Overload Action.

 Loading...
Loading...








