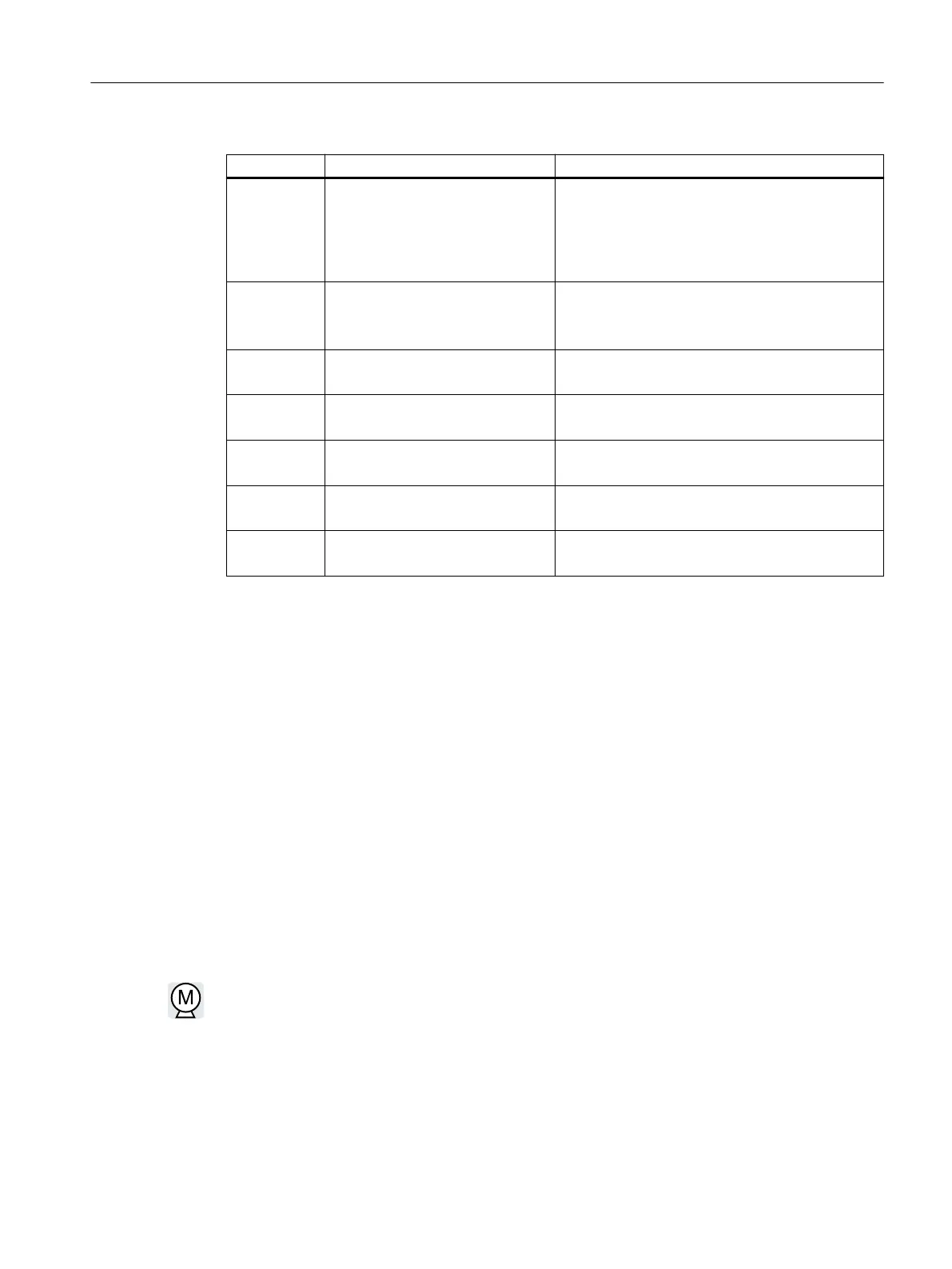
Parameter Description Setting
p1300[0...n] Open-loop/closed-loop control op‐
erating mode
Sets the open and closed-loop control mode of a
drive.
0: U/f control with linear characteristic (factory set‐
ting)
22: Torque control without speed encoder
p0300[0...n]
…
p0360[0...n]
Motor data Motor data is transferred from the motor rating
plate during quick commissioning and calculated
with the motor data identication.
p1511[0...n] CI: Supplementary torque 1 Sets the signal source for supplementary torque 1.
Factory setting: 0
p1520[0...n] CO: Torque limit upper [Nm] Sets the xed upper torque limit.
Factory setting: 0
p1521[0...n] CO: Torque limit lower [Nm] Sets the xed lower torque limit.
Factory setting: 0
p1530[0...n] Motoring power limit [kW] Sets the power limit when motoring.
Factory setting: 0
p1531[0...n] Regenerative power limit [kW] Sets the regenerative power limit.
Factory setting: -0.01
Additional information about this function is provided in the parameter list and in function
diagrams 6030 onwards in the List Manual.
7.21 Electrically braking the motor
A dierentiation is made between mechanically braking and electrically braking a motor:
• Mechanical brakes are generally motor holding brakes that are closed when the motor is at
a standstill. Mechanical operating brakes, that are closed while the motor is rotating are
subject to a high wear and are therefore often only used as an emergency brake.
If your motor is equipped with a motor holding brake, then you should use the converter
functions to control this motor holding brake, see Section Motor holding brake (Page 224).
• The motor is electrically braked by the converter. An electrical braking is completely wear-
free. Generally, a motor is switched o at standstill in order to save energy and so that the
motor temperature is not unnecessarily increased.
Braking with the motor in generating mode
If the motor brakes the connected load electrically, it will convert the kinetic energy of
the motor to electrical energy. The electrical energy E released on braking the load is
proportional to the moment of inertia J of the motor and load and to the square of the
speed n. The motor attempts to pass the energy on to the converter.
Advanced commissioning
7.21Electrically braking the motor
SINAMICS G115D Wall Mounted distributed drive
Operating Instructions, 07/2023, FW V4.7 SP14, A5E52808211A AA 309
 Loading...
Loading...









