7.20.3 Sensorless vector control with speed controller
7.20.3.1 Structure of vector control without encoder (sensorless)
Overview
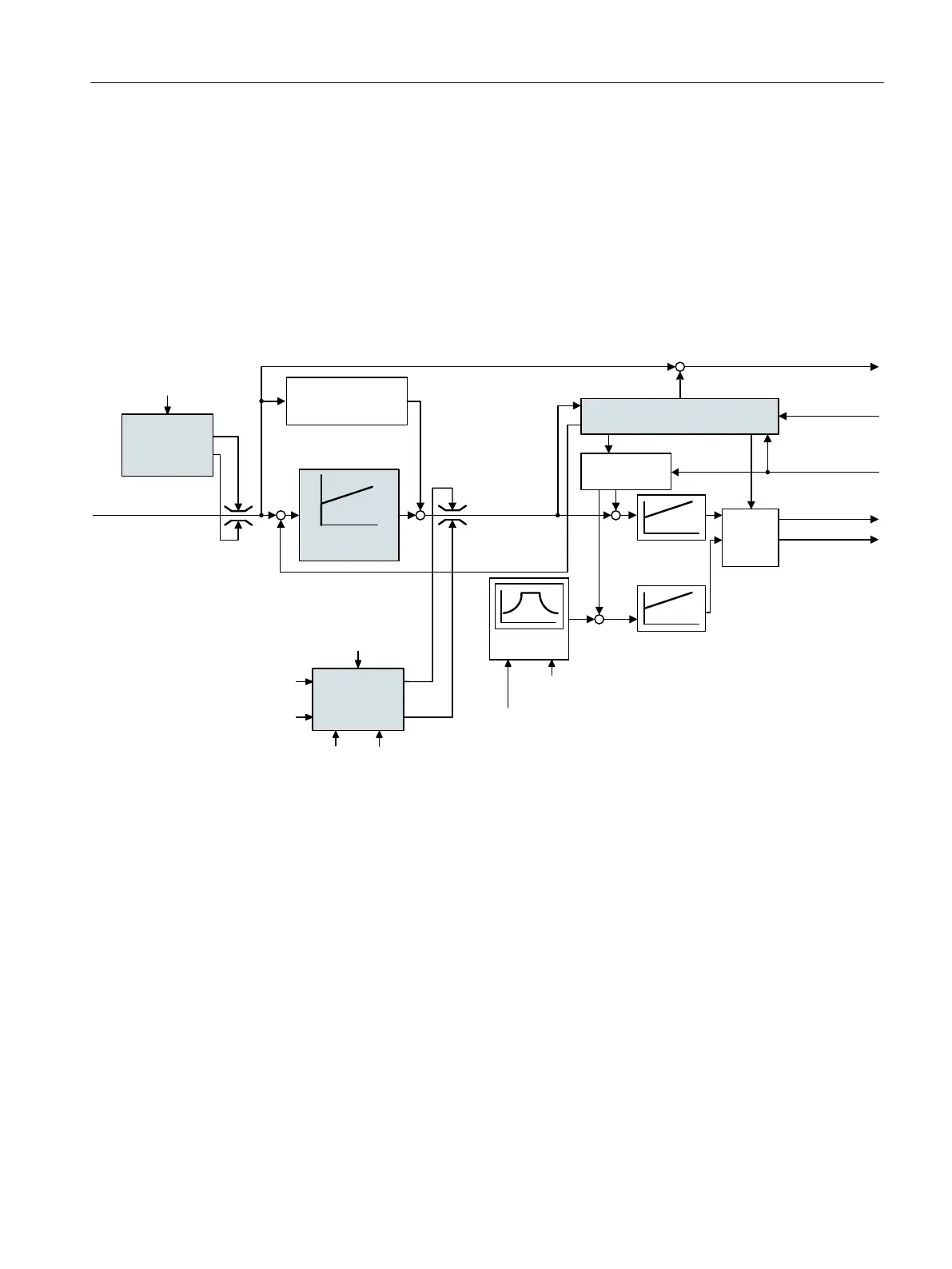
The vector control comprises closed-loop current control and a higher-level closed-loop speed
control.
,GFRQWUROOHU
,TFRQWUROOHU
6SHHGVHWSRLQW
&DOFXODWHGVSHHGDFWXDO
YDOXH
0RWRUDQGFXUUHQWPRGHO
&DOFXODWH
VSHHGOLPLWV
7RUTXH
VHWSRLQW
0HDVXUHG
YROWDJH
0HDVXUHG
FXUUHQW
2XWSXWIUHTXHQF\
2XWSXWYROWDJH
9ROWDJHDQJOH
6OLS
6SHHGFRQWUROOHU
7RUTXH
SUHFRQWURO
0D[LPXPVSHHG
&DOFXODWHDFFHOHUD
WLRQWRUTXH
7UDQVIRUPDWLRQ
7UDQVIRU
PDWLRQ
)OX[VHWSRLQW
8SSHUWRUTXHOLPLW
/RZHUWRUTXHOLPLW
&XUUHQWOLPLW
3RZHUOLPLWZKHQJHQHUDWLQJ
6WDWLFWRUTXHVHWSRLQW
6XSSOHPHQWDU\DFFHOHUDWLRQWRUTXH
3RZHUOLPLWZKHQPRWRULQJ
&DOFXODWH
WRUTXHOLPLWV
S
.
3
7
,
S
S
S
S
S
S
S
1)
for asynchronous motors
2)
Settings that are required
Using the motor model, the converter calculates the following closed-loop control signals
from the measured phase currents and the output voltage:
• Current component I
q
• Current component I
d
• Speed actual value
The setpoint of the current component I
d
(ux setpoint) is obtained from the motor data.
For speeds above the rated speed, the converter reduces the ux setpoint along the eld
weakening characteristic.
When the speed setpoint is increased, the speed controller responds with a higher setpoint
for current component I
q
(torque setpoint). The closed-loop control responds to a higher
torque setpoint by adding a higher slip frequency to the output frequency. The higher output
frequency also results in a higher motor slip, which is proportional to the accelerating torque.
Advanced commissioning
7.20Motor control
SINAMICS G115D Wall Mounted distributed drive
Operating Instructions, 07/2023, FW V4.7 SP14, A5E52808211A AA 289
 Loading...
Loading...









