Parameters
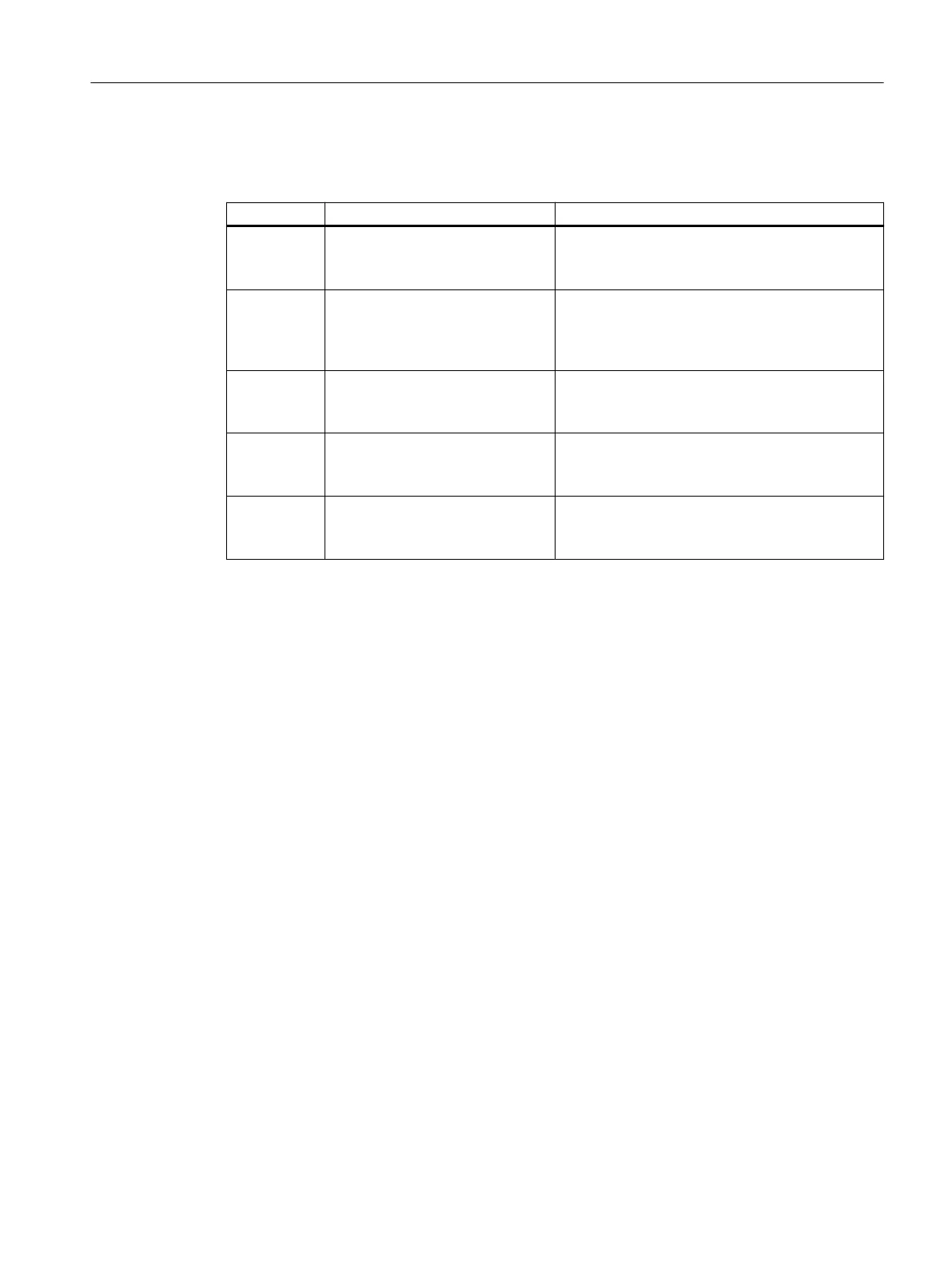
Encoderless speed control
Parameter Description Setting
p0342[0...n] Ratio between the total and motor
moment of inertia
Sets the ratio of moment of inertia load + motor to
moment of inertia of motor without load.
Factory setting: 1
p1452[0...n] Speed controller actual speed val‐
ue smoothing time (encoderless)
[ms]
Sets the smoothing time for the actual speed of the
speed controller for encoderless closed-loop speed
control.
Factory setting: 10
p1470[0...n] Speed controller encoderless oper‐
ation P gain
Sets the P gain for encoderless operation for the
speed controller.
Factory setting: 0.3
p1472[0...n] Speed controller encoderless oper‐
ation integral time [ms]
Set the integral time for encoderless operation for
the speed controller.
Factory setting: 20
p1496[0...n] Acceleration precontrol scaling [%] Sets the scaling for the acceleration precontrol of
the speed/velocity controller.
Factory setting: 0
7.20.3.3 Advanced settings
K
P
and T
I
adaptation
K
p
and T
I
adaptation suppress speed control oscillations that may occur. The "rotating
measurement" of the motor data identication optimizes the speed controller. If you have
performed the rotating measurement, then the K
p
- and T
n
adaptation has been set.
You can nd additional information in the List Manual:
• Vector control with speed controller: Function diagram 6050
Droop
For mechanically coupled drives, there is the risk that the drives oppose one another: Small
deviations in the speed setpoint or actual value of the coupled drives can mean that the drives
are operated with signicantly dierent torques.
The droop function ensures even torque distribution between several mechanically coupled
drives.
The droop function reduces the speed setpoint as a function of the torque setpoint.
Advanced commissioning
7.20Motor control
SINAMICS G115D Wall Mounted distributed drive
Operating Instructions, 07/2023, FW V4.7 SP14, A5E52808211A AA 293
 Loading...
Loading...









