Programming and Operating Manual (Turning)
94 01/2017
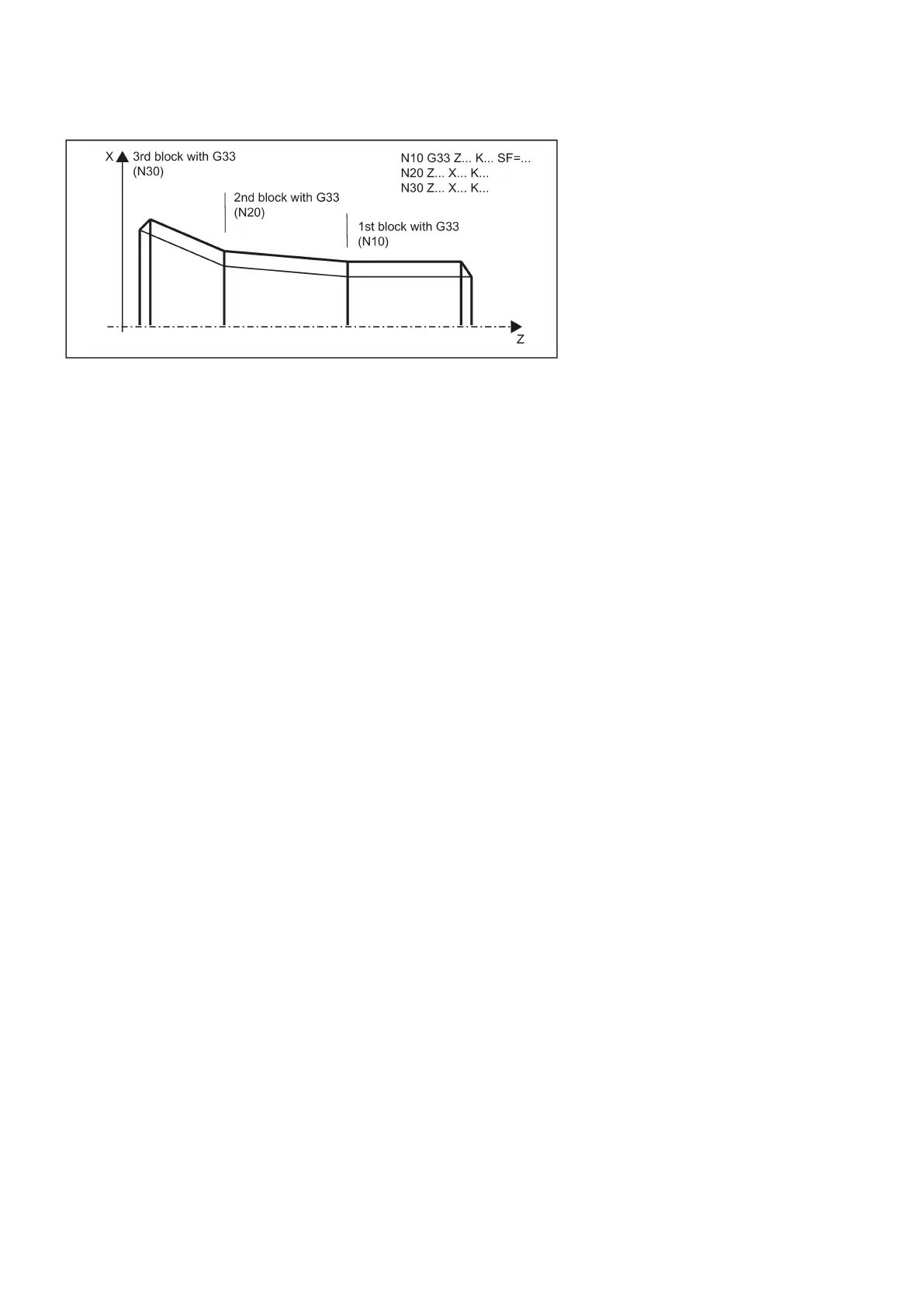
See the following example of multi-block thread chaining:
When cutting threads with G33, you can determine the axis velocity based on the spindle speed and the thread lead.
However, the maximum axis velocity (rapid traverse) defined in the machine data cannot be exceeded; otherwise, alarms
will appear.
Information on the override switch
● The spindle speed override switch must remain unchanged for thread machining.
● The feedrate override switch has no meaning in this block.
Programmable run-in and run-out path for G33: DITS, DITE
Functionality
The run-in and run-out path must also be traversed to the required thread with thread G33. The starting and braking of the
axis (both axes in case of a tapered thread) are performed in these areas. This path depends on the thread lead, spindle
speed, and the axis dynamics (configuration).
If the available path for run-in or run-out is limited, it may be necessary to reduce the spindle speed so that this path is
sufficient.
In this case, the run-in and run-out paths can be specified separately in the program to achieve favorable cutting values and
short machining time or to simplify the handling of this issue. If no values are specified, the values from the setting data
apply. The specifications in the program are written into SD42010: THREAD_RAMP_DISP[0] ... [1].
If this path is not sufficient for the traversing with the configured axis acceleration, the axis is overloaded in terms of
acceleration. Alarm 22280 ("Programmed run-in path too short") is then issued for the thread run-in. The alarm is purely for
information and has no effect on part program execution.
The run-out path acts as a retracting distance at the end of the thread. This achieves a smooth change in the axis movement
when retracting is in progress.
; Run-in path of the thread for G33
; Run-out path of the thread for G33
Values for DITS and DITE or SD42010: THREAD_RAMP_DISP
1 ... < 0:
rting/braking of the feed axis is carried out with the configured acceleration.
Jerk according to current BRISK/SOFT programming.
Abrupt starting/braking of the feedrate axis on thread cutting.
-in/run-out path of the thread is predefined for G33.
To avoid alarm 22280, the acceleration limits of the axis must be observed in case of very small run
-
Note: The value of SD42010 after reset/program start is -1.